1Ewha Womans University, Korea kim.sujeong@ewhain.net kimy@ewha.ac.kr 2INRIA Rhone-Alpes, France stephane.redon@inria.fr |
Abstract
![]()
We present a novel algorithm to perform continuous collision
detection (CCD) for articulated bodies when the motion of bodies
is governed by an adaptive dynamics simulation. The algorithm is
based on a novel hierarchical set of transforms to represent the
kinematics of an articulated body recursively described by an
assembly tree. The performance of our CCD algorithm significantly
improves as the number of active degrees of freedom in the
adaptive simulation of articulated bodies decreases.
Key Words
![]()
Continuous collision detection, Articulated body
dynamics, Adaptive dynamics, Interval arithmetic
Full Text
![]() pdf (1.4MBytes)
pdf (1.4MBytes)
Download Video
![]()
Benchmark Scenario |
Number of active joints |
Windows Media Video 9 |
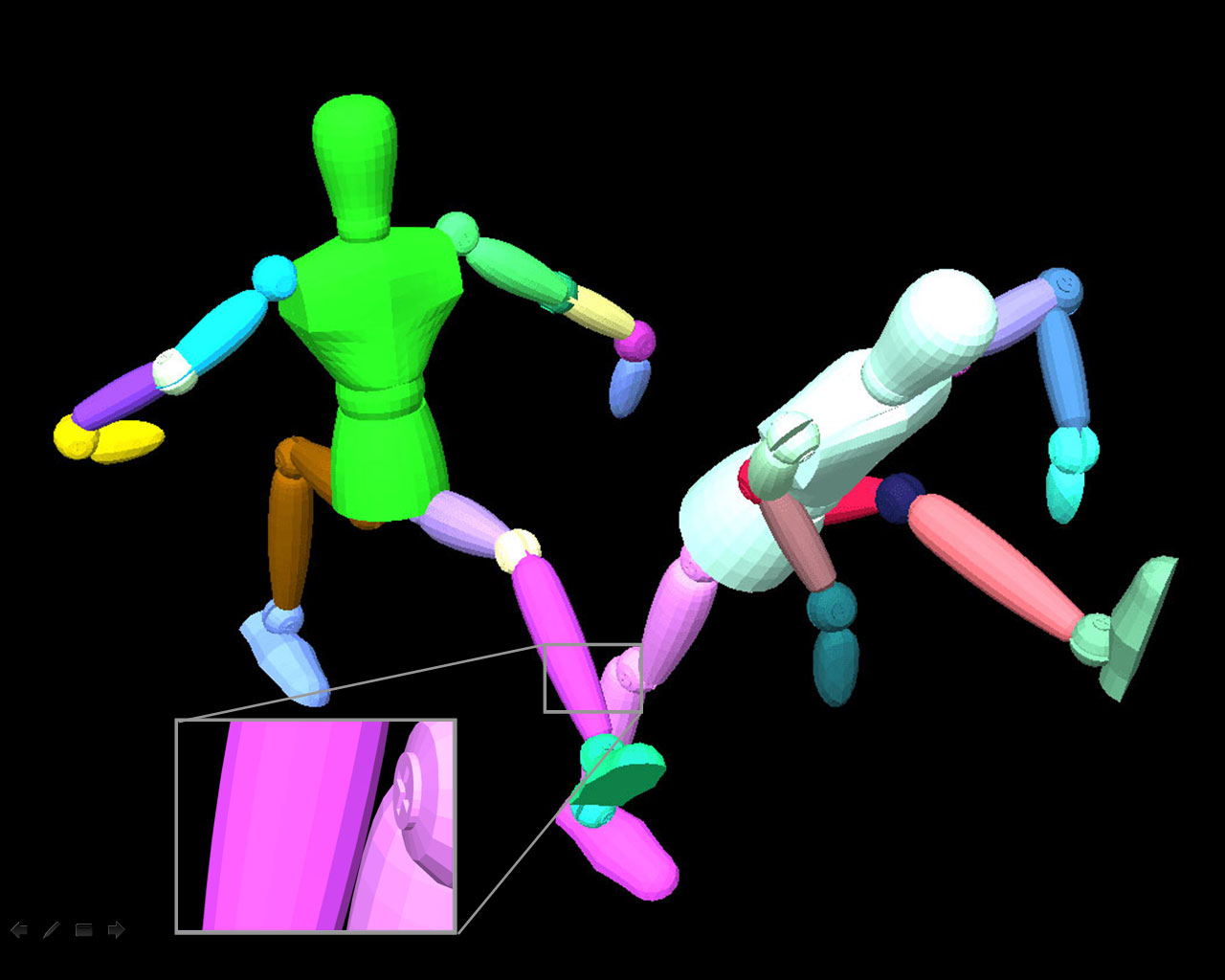
Wooden Men |
0 (Rigid) |
|
15 |
||
28 (All) |
||
Pendulum |
15 |
|
30 (All) |
||
Falling Wooden Man |
0 (Rigid) |
|
15 |
||
28 (All) |
( Download Windows Media Video 9 Codec )
Benchmarking Scenarios
![]()
Wooden Men |
 |
A Pendulum |
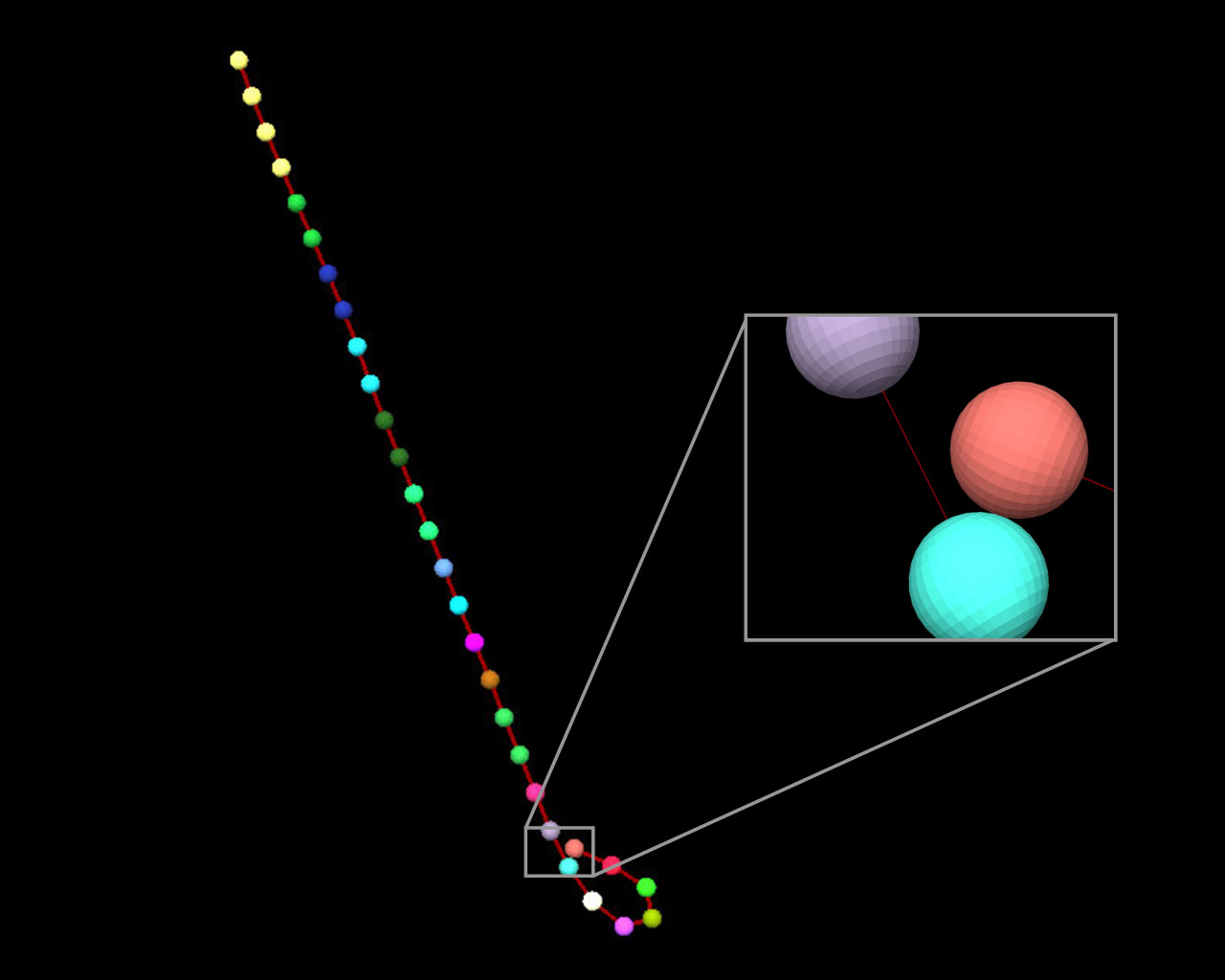 |
|
Falling Wooden Man |
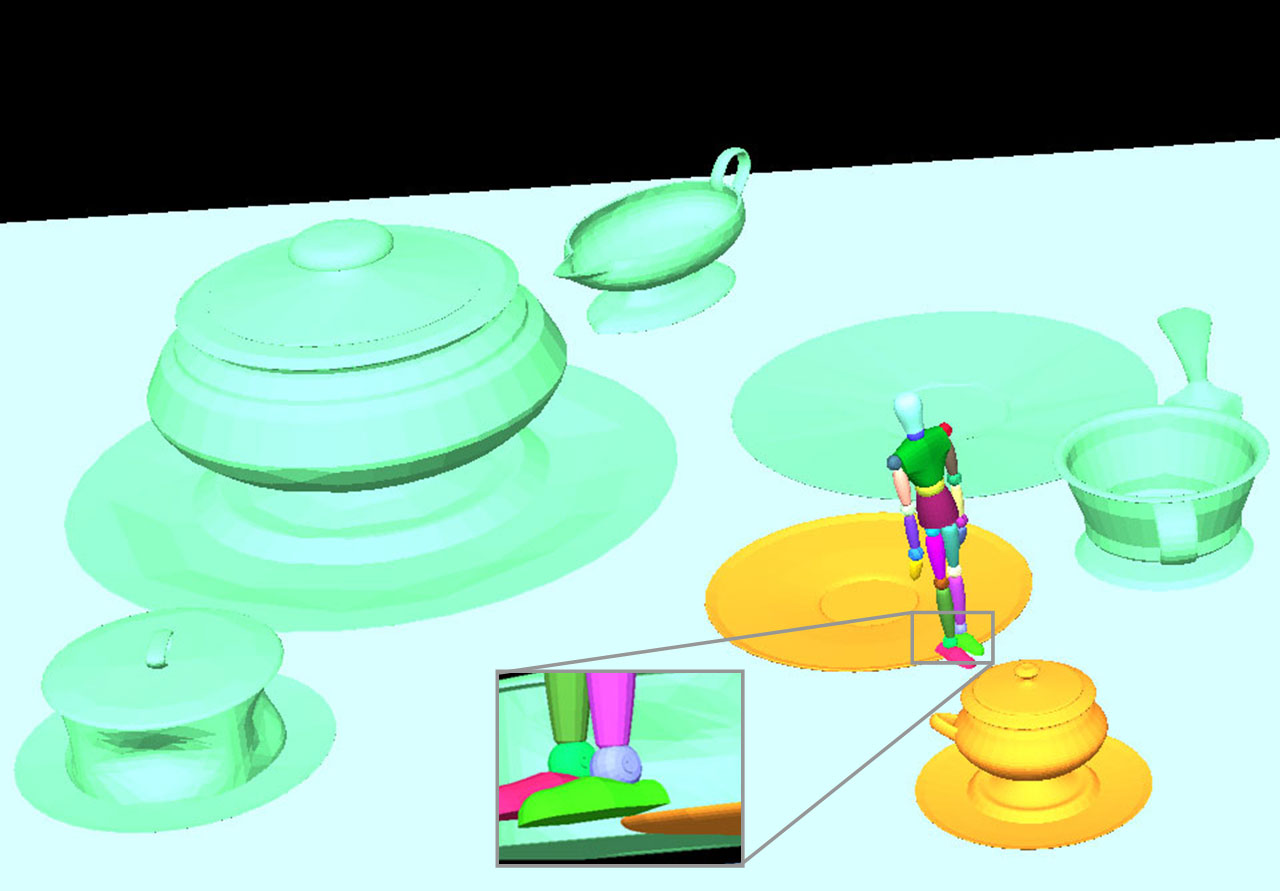 |
|
In these figures, rigid bodies with identical colors belong to the same group of rigidified links
Links to Relevant Research
![]()
Adaptive Dynamics of Articulated Bodies project page
by Stephane Redon, Nico Galoppo and Ming C. Lin
Fast Continuous Collision Detection for Articulated Models project pageby Stephane Redon, Young J. Kim, Ming C. Lin, Dinesh Manocha
Copyright 2006 Computer Graphics Laboratory
Dept of Computer Science & Engineering
Ewha Womans University, Seoul, Korea
Last update: Dec 1, 2006