|
Continuous Collision Detection for Non-rigid Contact
Computations
|
||||||||||
Abstract We present a novel algorithm to
perform continuous collision detection (CCD) between non-rigid,
deformable models using local advancement. Given the initial and
final configurations of a deformable model, our algorithm computes
linear deformation by interpolating the vertices from the initial to
the final configurations with a straight line path and checks for
collision along that path. Our approach is applicable to
polygon-soup models with arbitrary topology, handles self collisions
and makes no assumption about the underlying nonrigid motion. We
accelerate the algorithm by computing motion bounds on the
primitives and their bounding volumes. These bounds are combined
with hierarchical culling techniques and used for fast collision
checking. In practice, we have observed
|
||||||||||
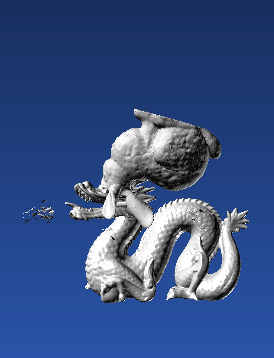
Benchmarking Scenarios1. UNC Dynamic Scene BenchmarksOur method can be used to detect self-collision on dynamic scene benchmarks, and finding out the global ToC for entitle body or per-Triangle ToCs.
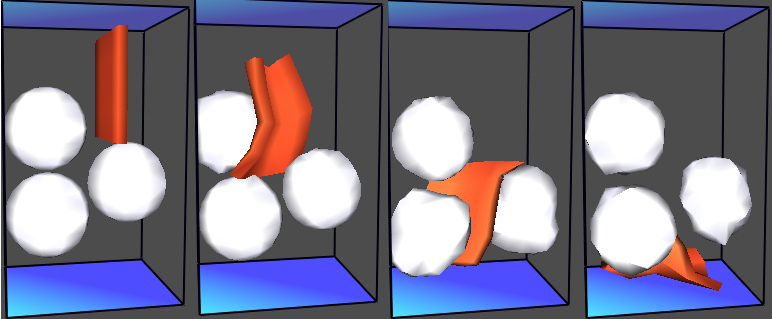
2. Deformable Motion Planning Benchmarks We also used a different set of benchmarks based on
motion planning in an environment composed of deformable
RELATED LINKSUNC Dynamic Scene Benchmarks: http://www.cs.unc.edu/˜geom/DynamicB/ Self-CCD: Continuous Collision Detection for Deforming Objectshttp://gamma.cs.unc.edu/SELFCD/ Open CCD: |
||||||||||
|