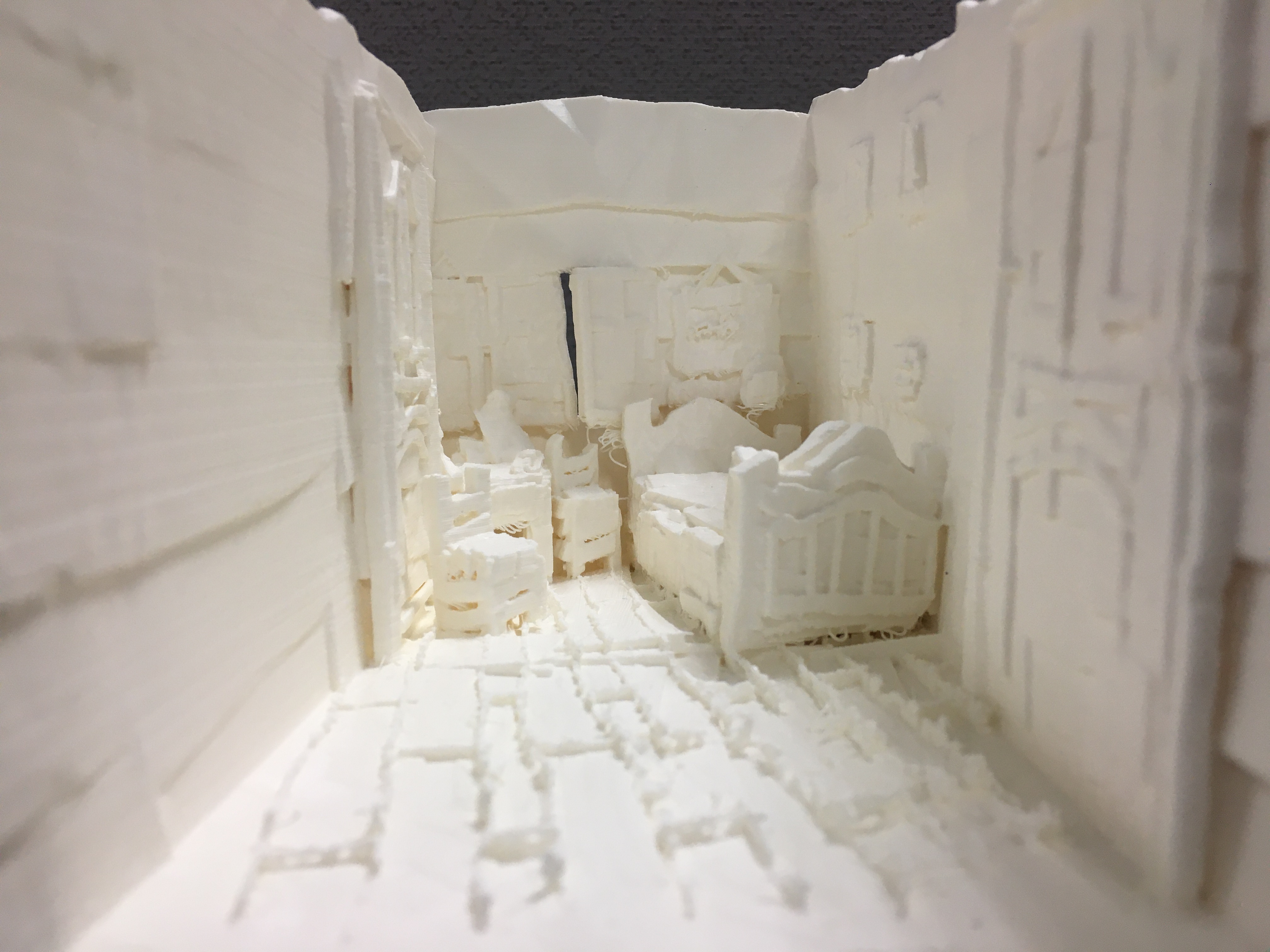
Since the concept of virtual reality was introduced, many researchers have made various efforts for
virtual painting without being impeded by physical constraints, such as canvas size or painting material
Recently, a few VR painting softwares have appeared such as Tilt Brush, Quill, and CanvoX to resurge such an
interest.
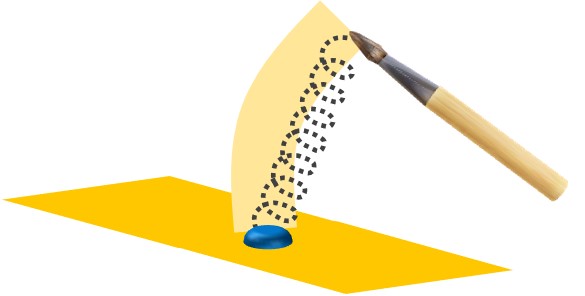
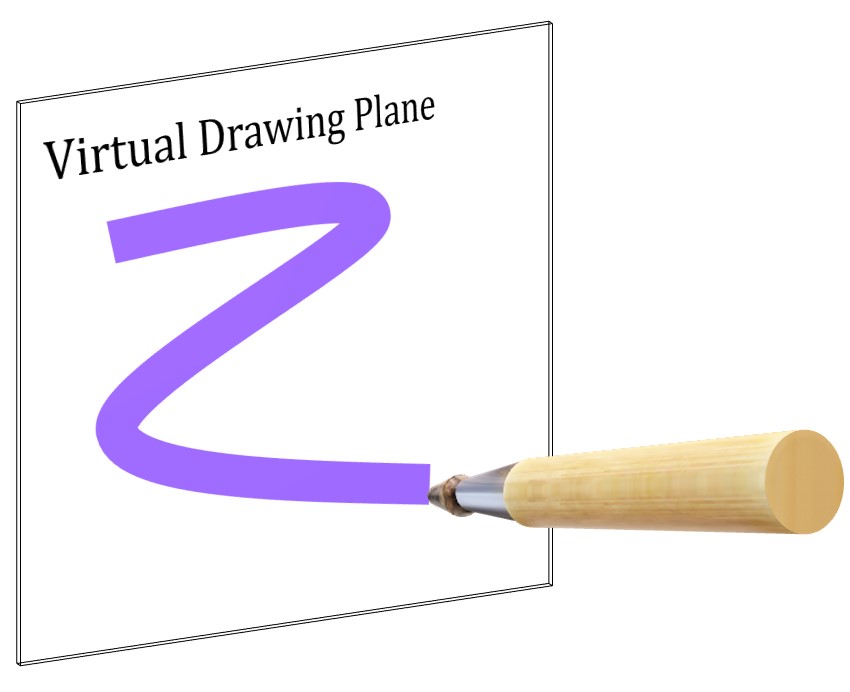
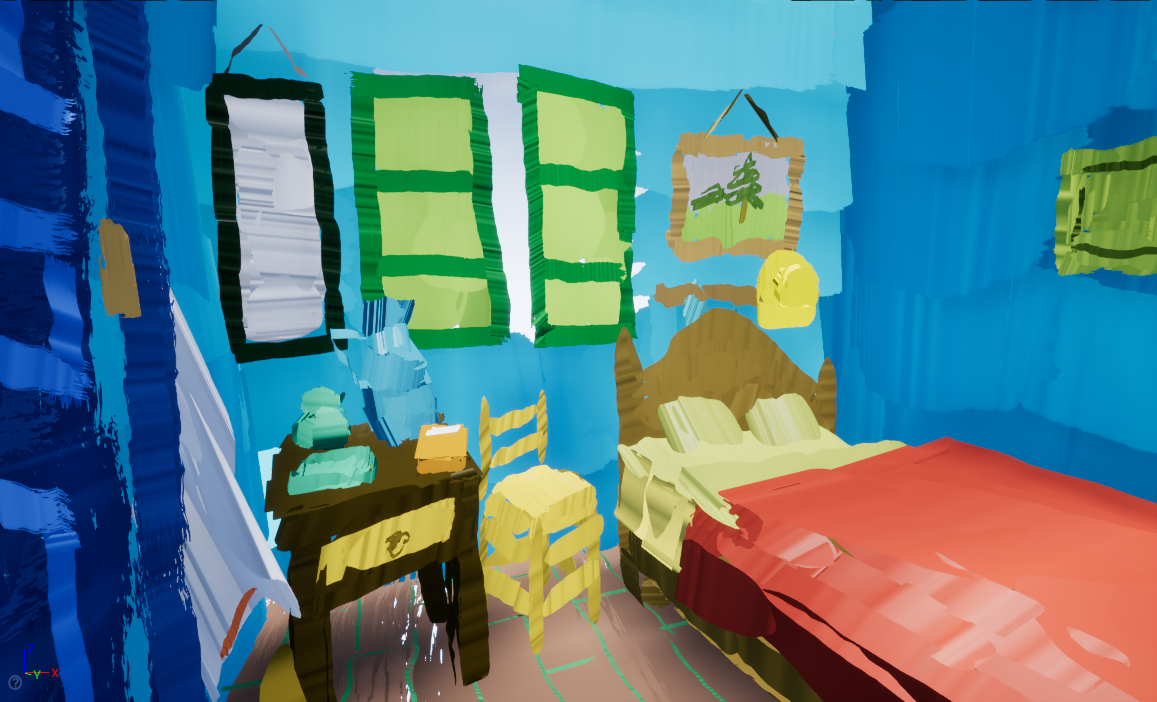
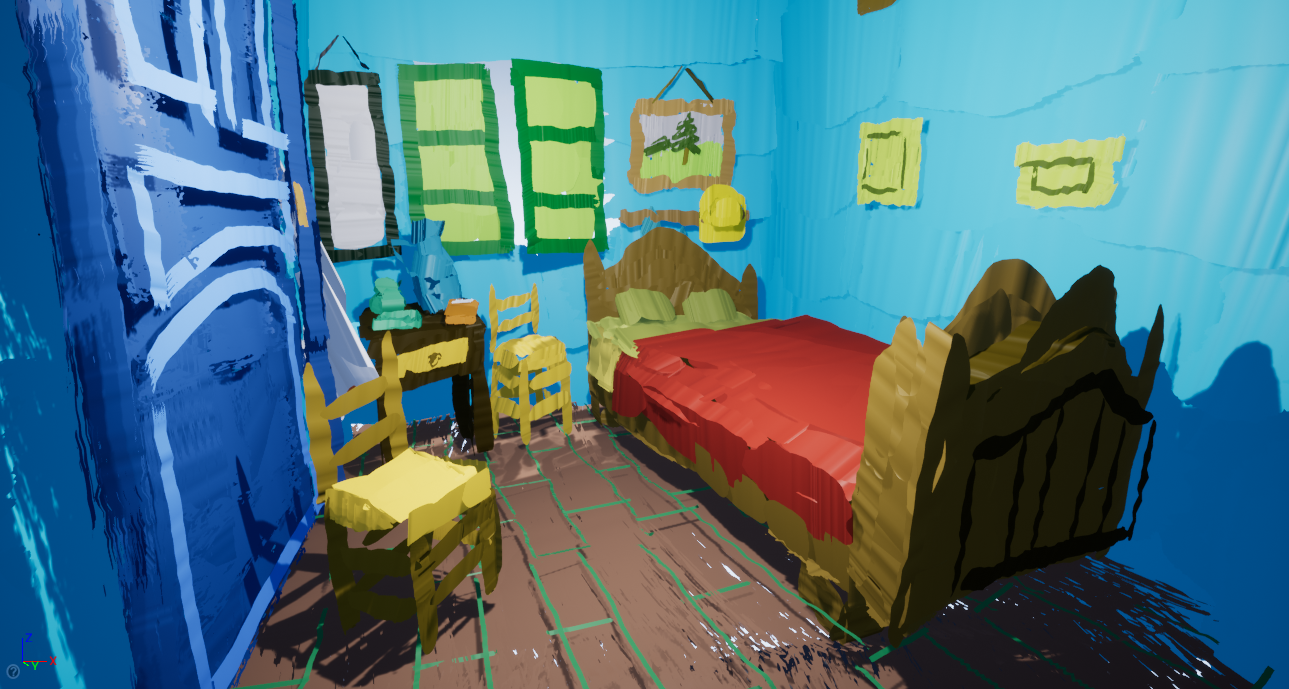
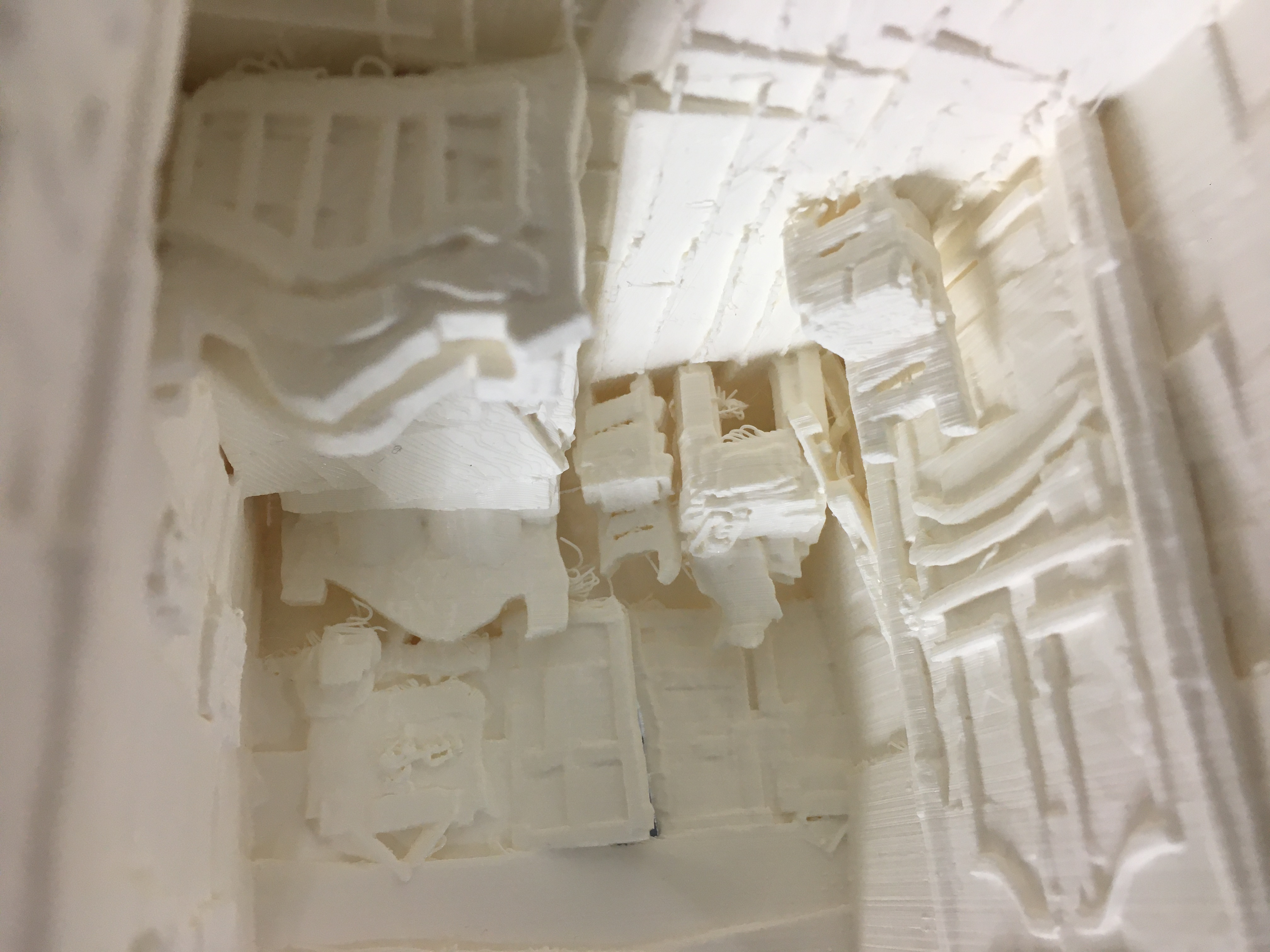
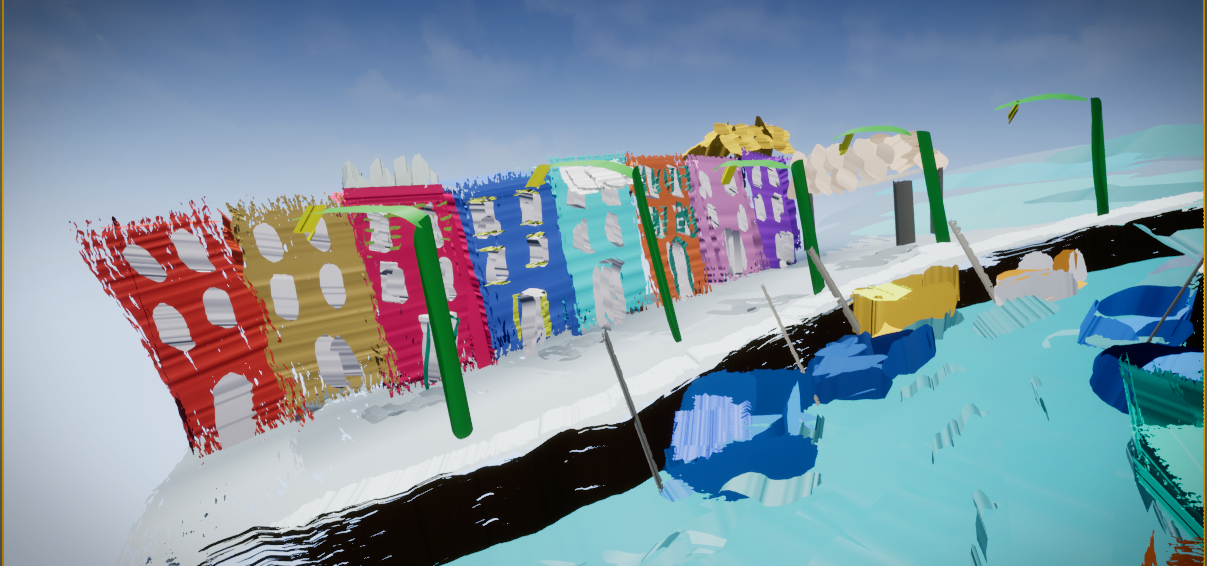
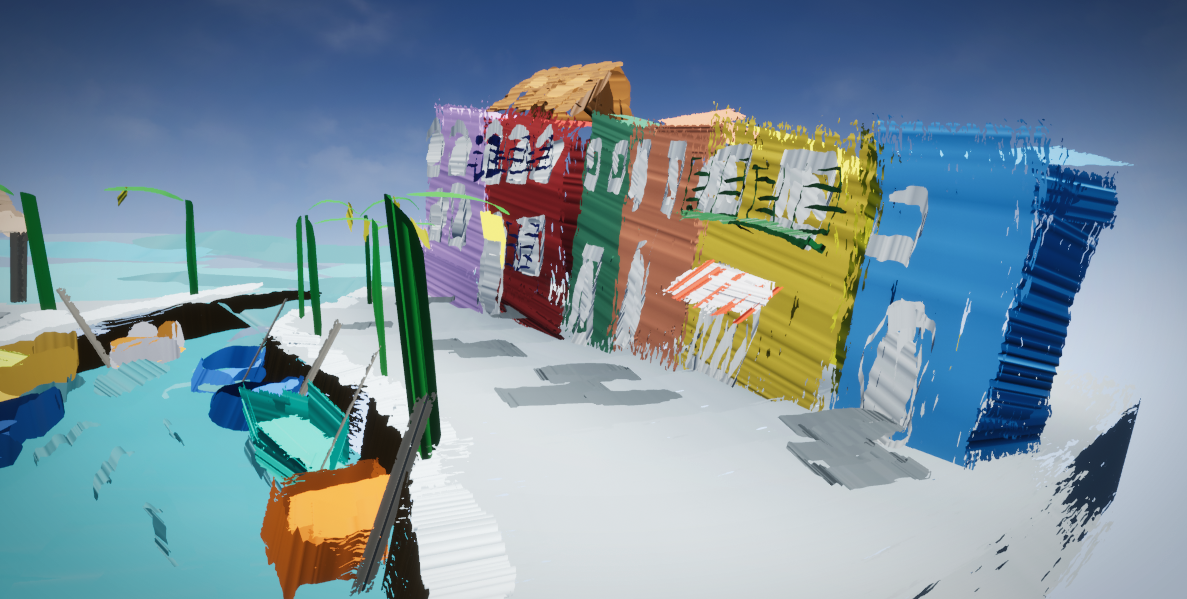
Due to the nature of VR painting, which draws in the air users, only rely on visual feedback to check the
progress of the painting. However, the visual depth cue that users can perceive does not always match the
geometric depth in the VR, which is the main cause of unintended stroking results. Therefore, users have to
repeatedly draw strokes to fix it This may reduce users’ overall productivity and also can result in significant
physical fatigue as well.
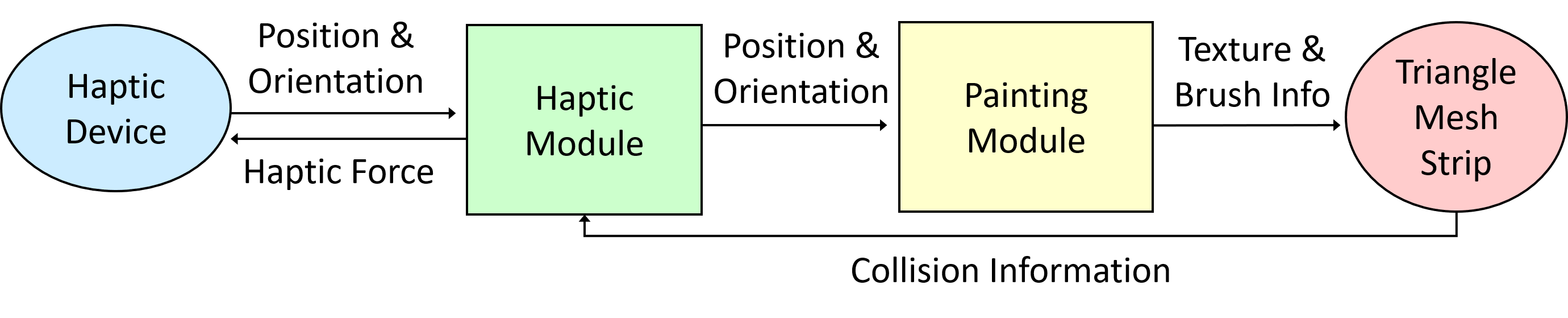
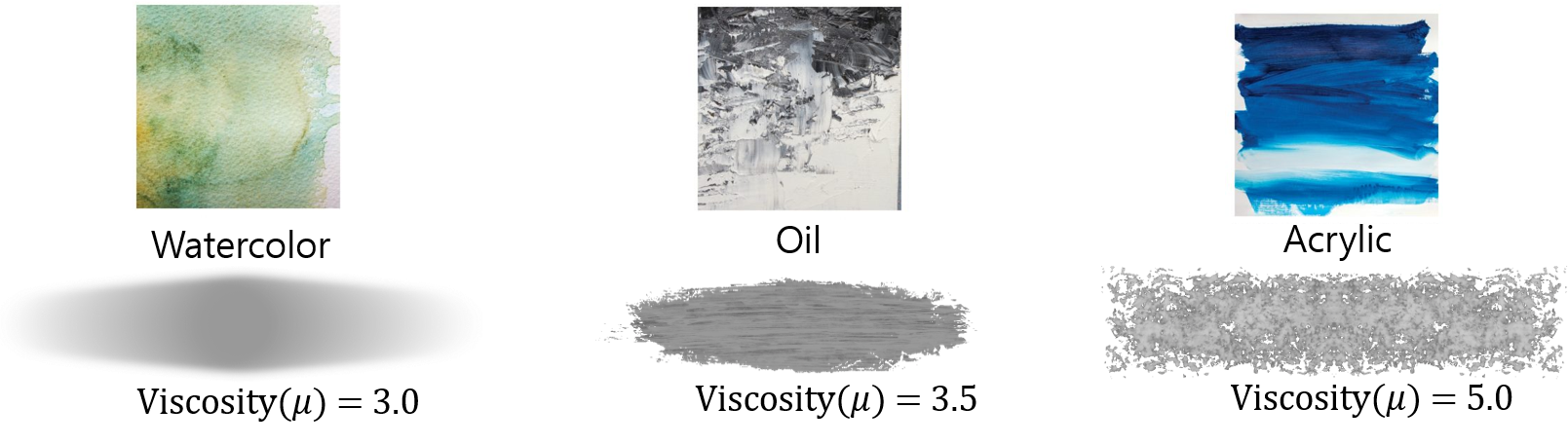
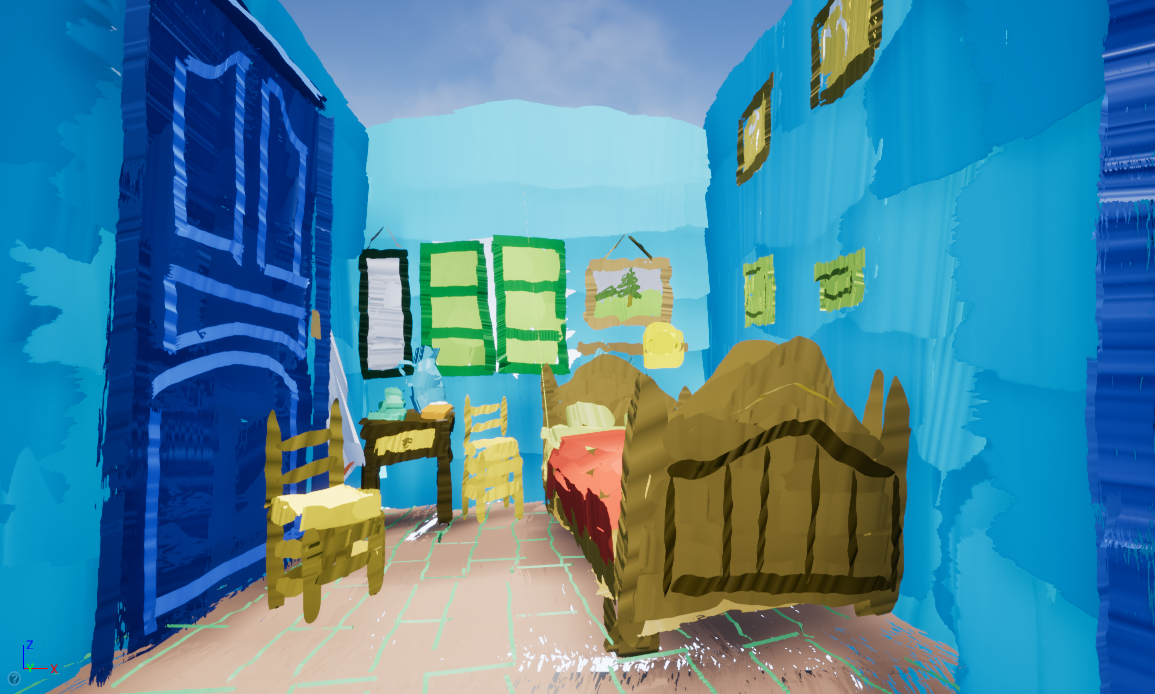
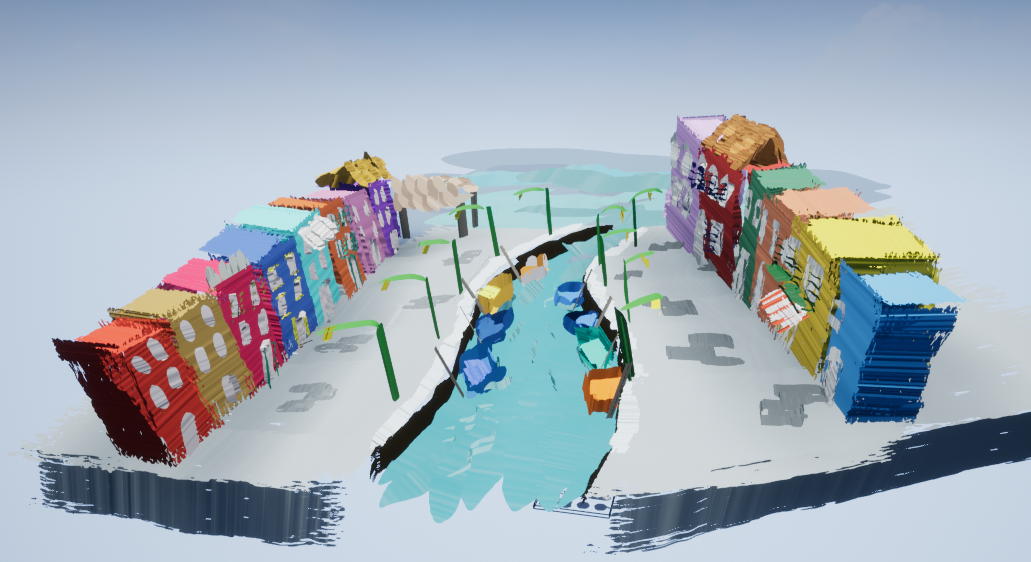
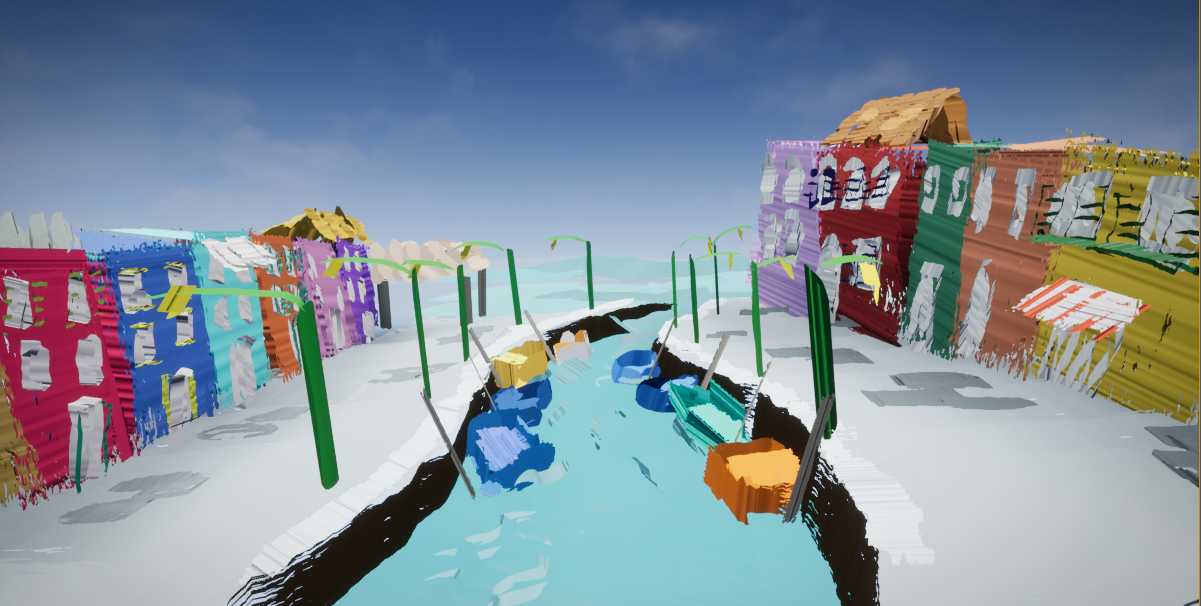
We propose haptic interfaces using force feedback devices to address the problems of the existing VR
painting systems Through this system, users can experience more effective and less stressful VR painting.