|
PhongPD: Gradient-continuous Penetration Metric for Polygonal Models using Phong Projection
Youngeun Lee and Young J. Kim Department of Computer Science & Engineering Ewha Womans University, Seoul, Korea youngeunlee@ewhain.net, kimy@ewha.ac.kr
IEEE International Conference on Robotics and Automation (ICRA) [Paper][Errata]
|
|
Red: Original Motion, Green: Conventional PD, Cyan: PhongPD
|
|
Abstract We present a novel algorithm to compute a gradient-continuous penetration depth (PhongPD) between two interpenetrated polygonal models. Our penetration depth (PD) formulation ensures separating the intersected models by translation, and the amount of such translation is close to an optimal motion to resolve interpenetration in most cases. In order to achieve the gradient-continuity in our algorithm, we interpolate tangent planes continuously over the contact space and then perform a projection along a normal direction defined by the interpolated tangent planes; this projection scheme is known as Phong projection. We have implemented our PhongPD algorithm and certifies its continuity using three benchmarks consisting of diverse combinatorial complexities, and show that our algorithm shows smoother PD results than a conventional Euclidean-projection-based PD method.
|
|
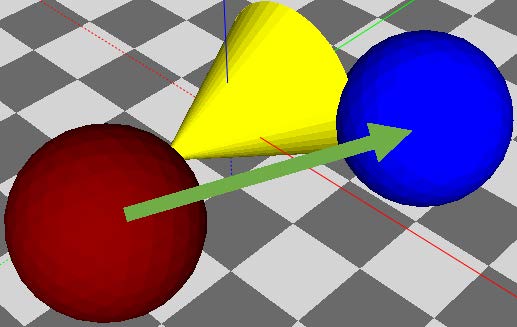
Benchmarking Scenarios 1. Ball & Cone The ball moves from the red to the blue position.
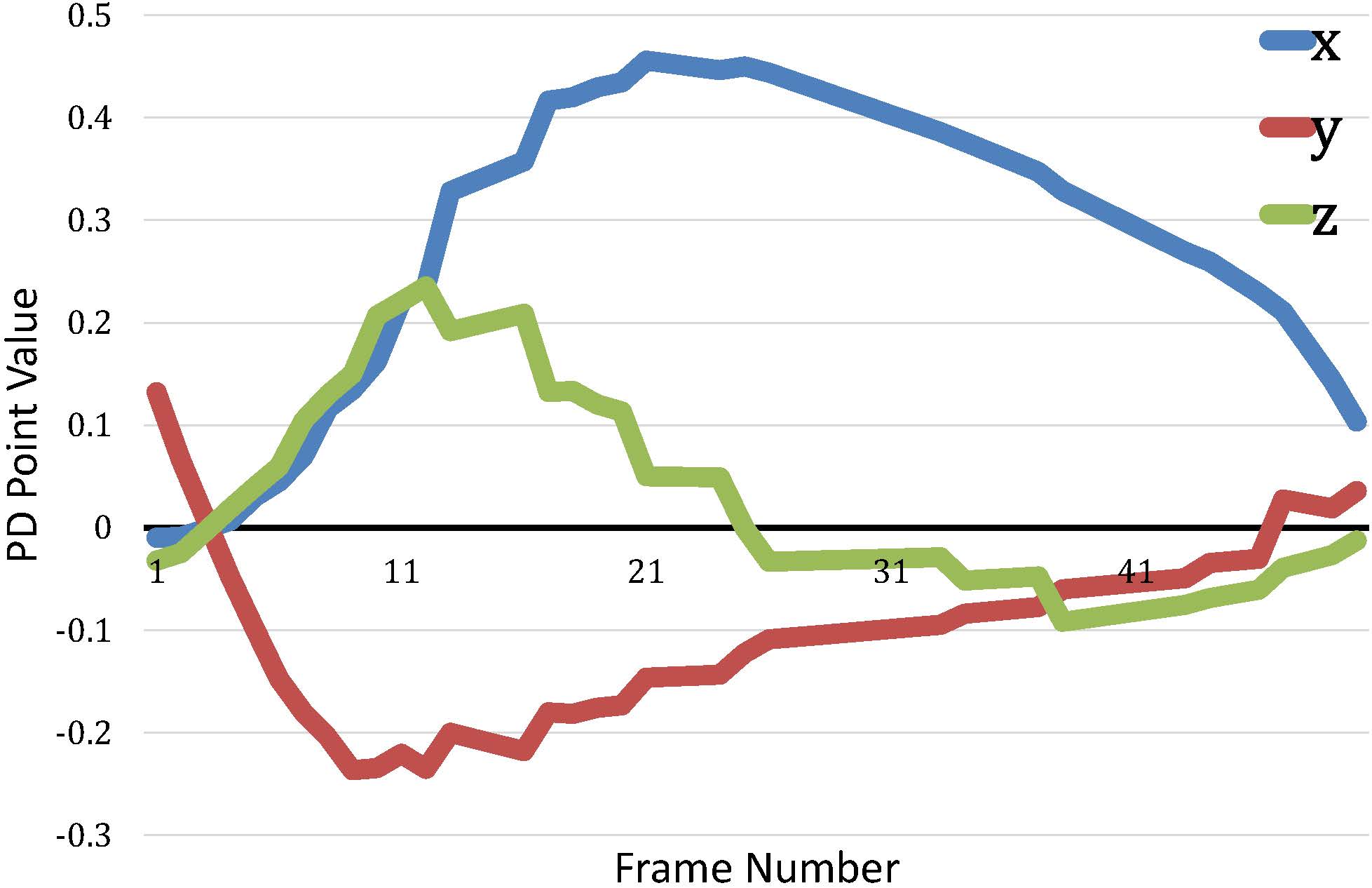
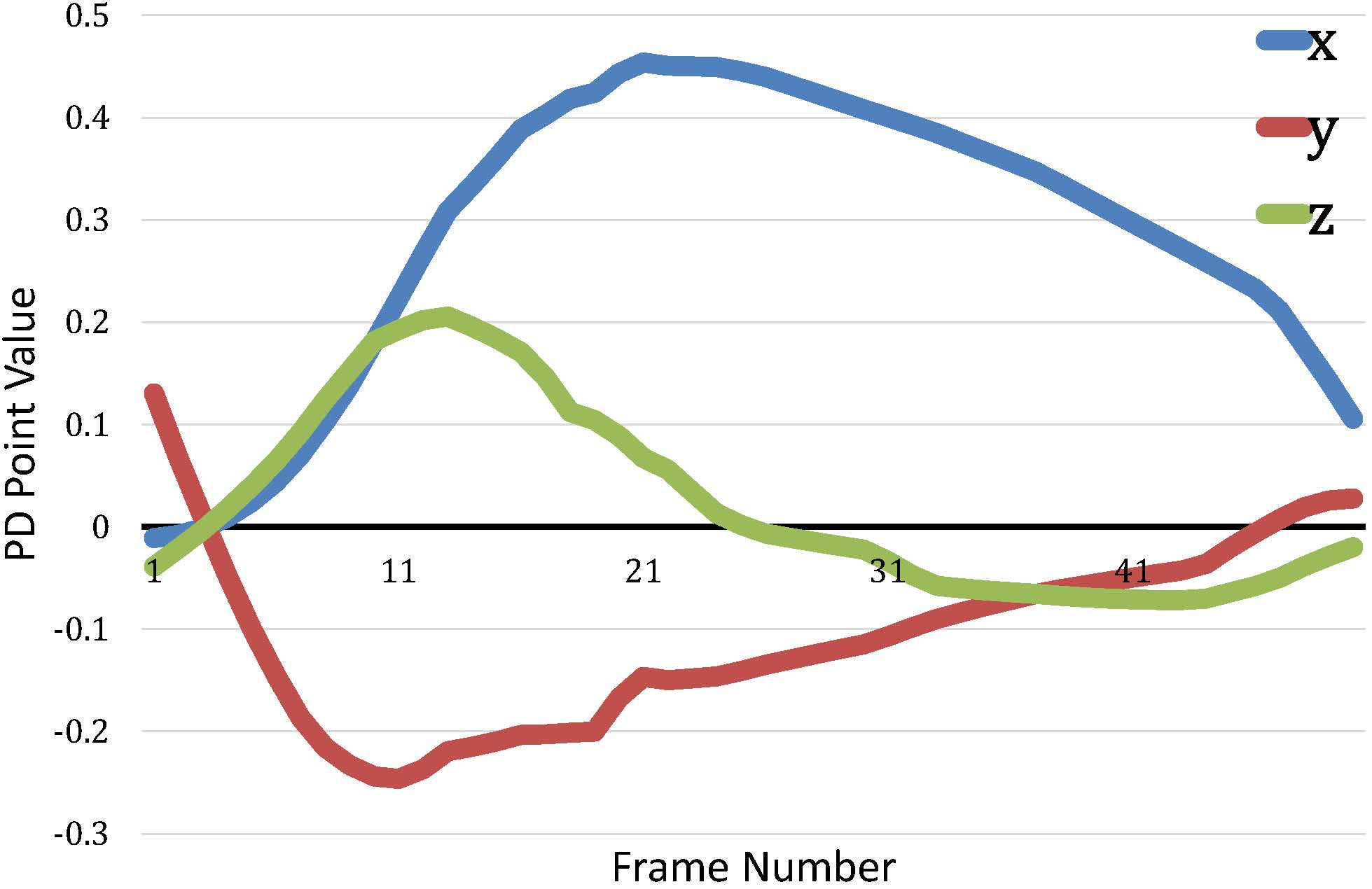
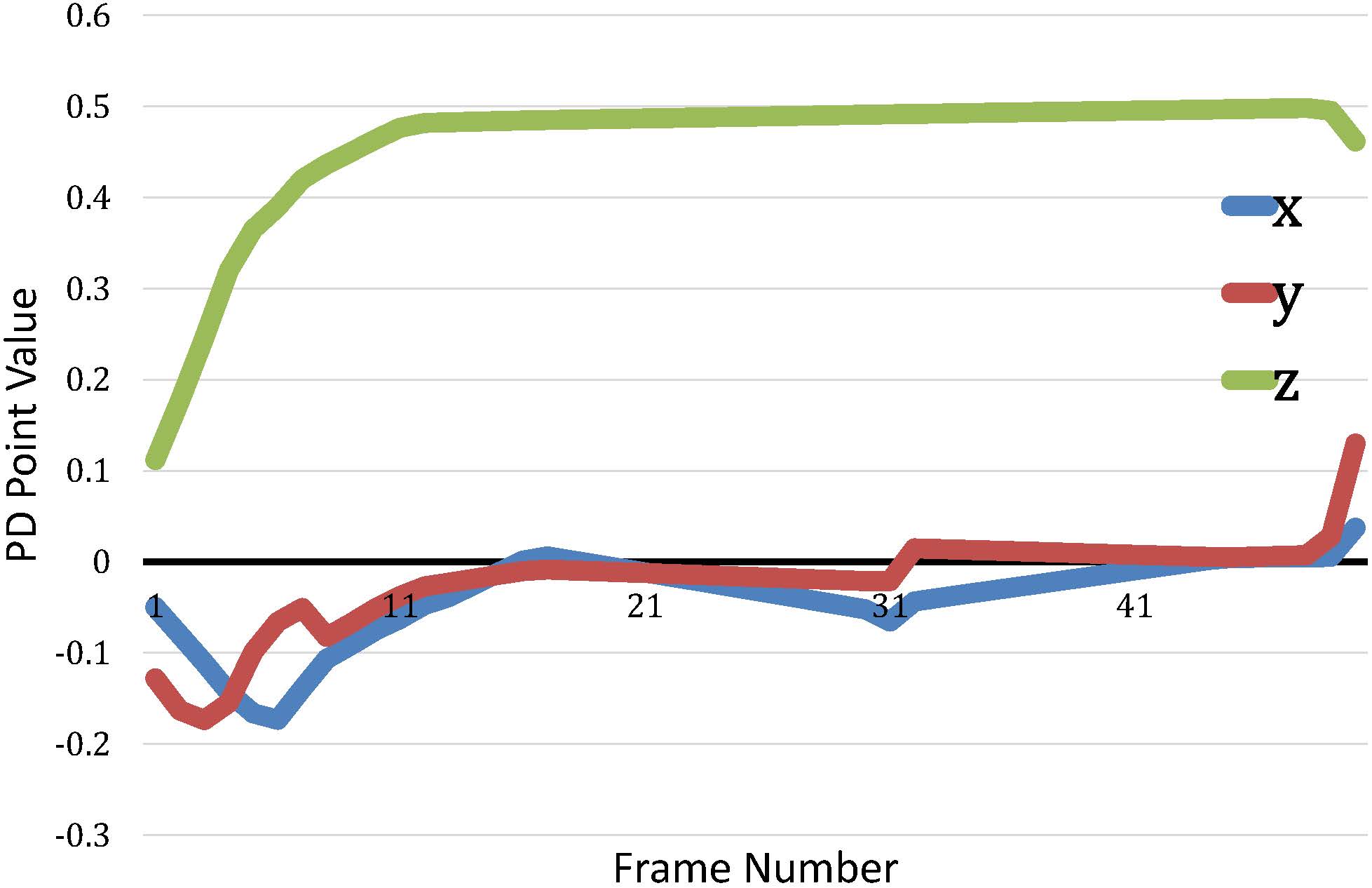
x, y, and z component of Conventional PD x, y, and z component of PhongPD
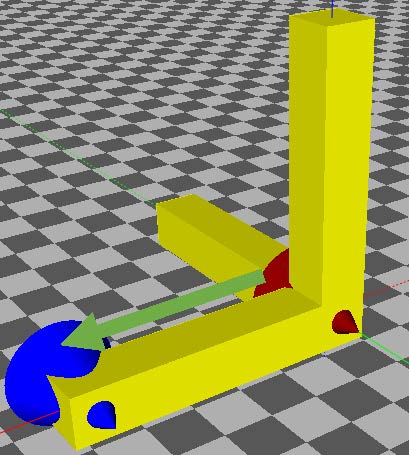
2. Cone & Axes The cone moves from the red to the blue position.
x, y, and z component of Conventional PD x, y, and z component of PhongPD
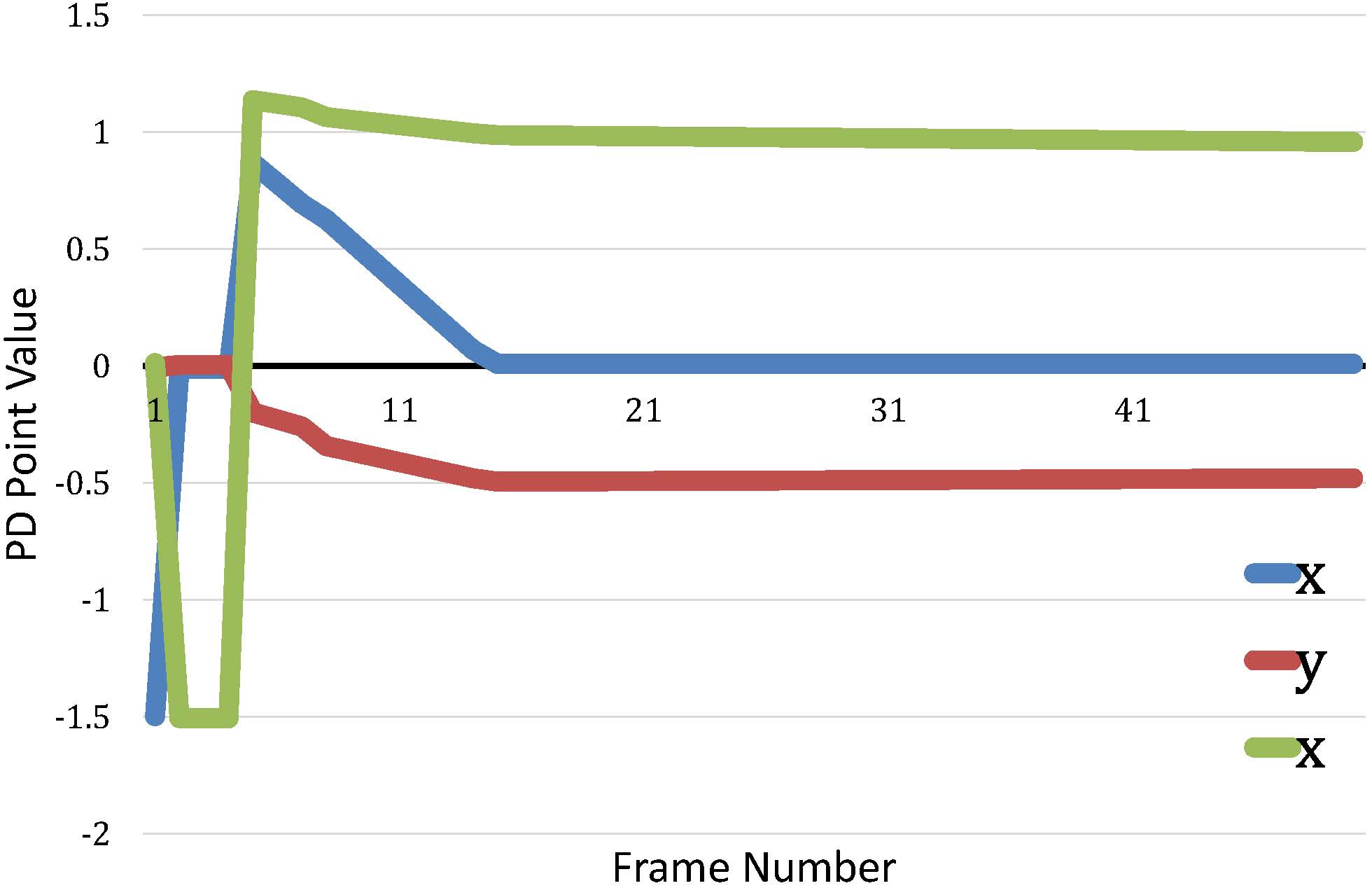
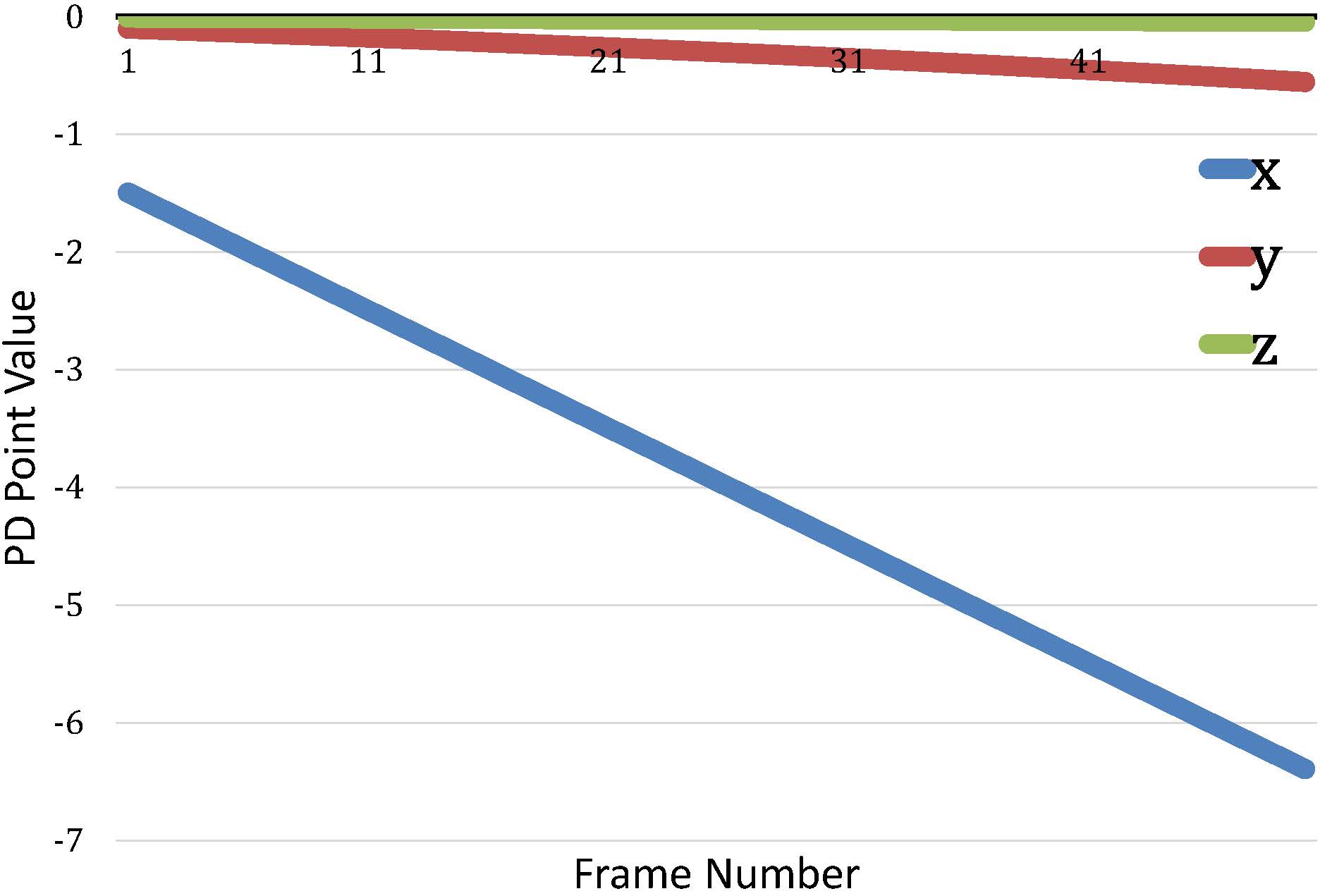
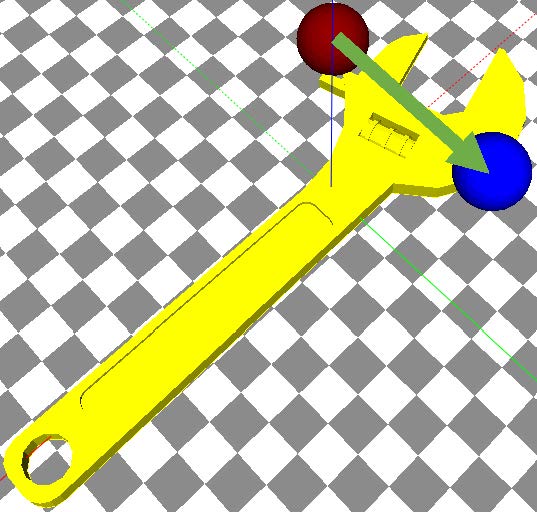
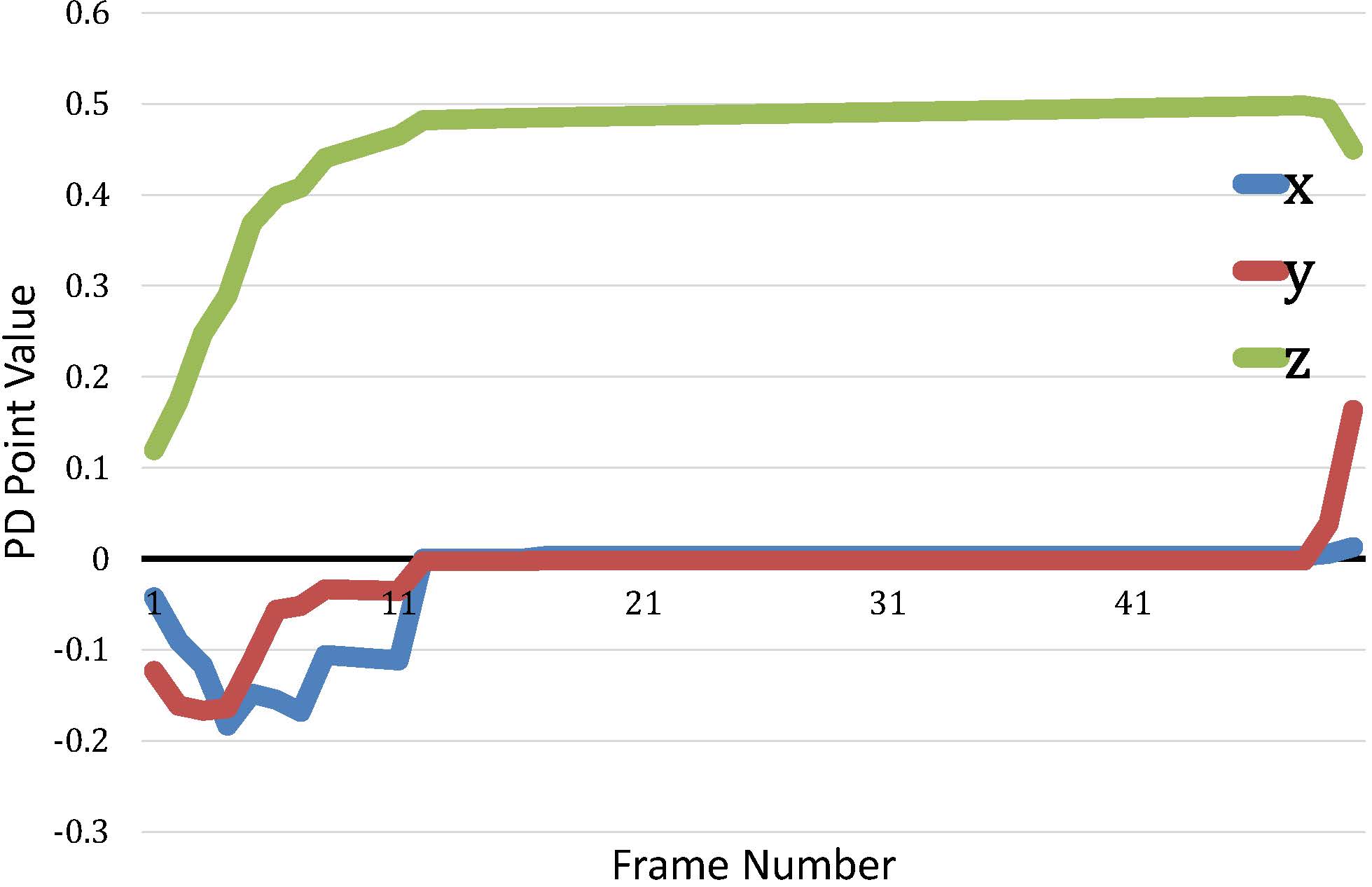
3. Ball & Wrench The Ball moves from the red to the blue position.
x, y, and z component of Conventional PD x, y, and z component of PhongPD
|
|
Related Links
Weighted Averages on Surfaces Library: http://igl.ethz.ch/projects/wa/
m+3d Library: http://masc.cs.gmu.edu/wiki/SimpleMsum
|
|
Copyright 2015 Computer Graphics Laboratory Dept of Computer Science & Engineering Ewha Womans University, Seoul, Korea Last update: 2015-06-05 |