1Ewha Womans University, Korea kim.sujeong@ewhain.net kimy@ewha.ac.kr 2INRIA Rhone-Alpes, France stephane.redon@inria.fr |
Abstract
![]()
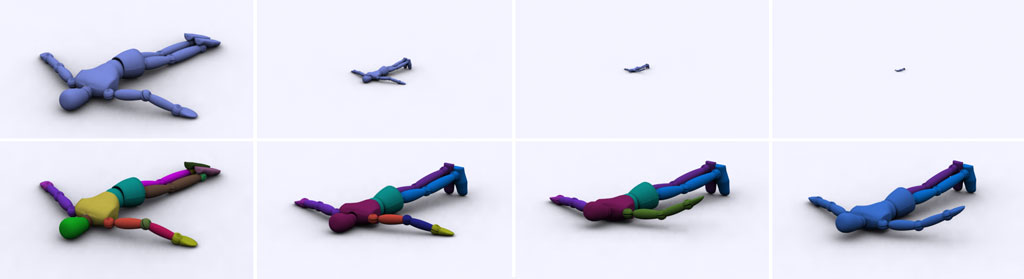
We propose a method for view-dependent simplification of articulated-body dynamics,
which enables an automatic trade-off between visual precision and computational
efficiency. We begin by discussing the problem of simplifying the simulation based on
visual criteria, and show that it raises a number of challenging questions. We then focus
on articulated-body dynamics simulation, and propose a semi-predictive approach
which relies on a combination of exact, a priori error metrics computations, and visibility
estimations. We suggest several variants of semi-predictive metrics based on
hierarchical data structures and the use of graphics hardware, and discuss their relative
merits in terms of computational efficiency and precision. Finally, we present several
benchmarks and demonstrate how our view-dependent articulated-body dynamics
method allows an animator (or a physics engine) to finely tune the visual quality and
obtain potentially significant speed-ups during interactive or off-line simulations.
Key Words
![]()
dynamics, kinematics, level-of-detail, simulation, articulated bodies
Full Text
![]() pdf (6.5MBytes)
pdf (6.5MBytes)
Download Video
![]()
Benchmark Scenario |
Video |
Swinging Pendulum |
|
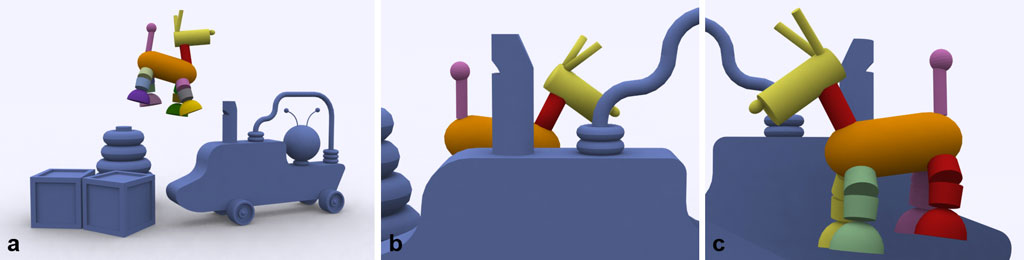
Haptic-enabled Dog Puppet |
|
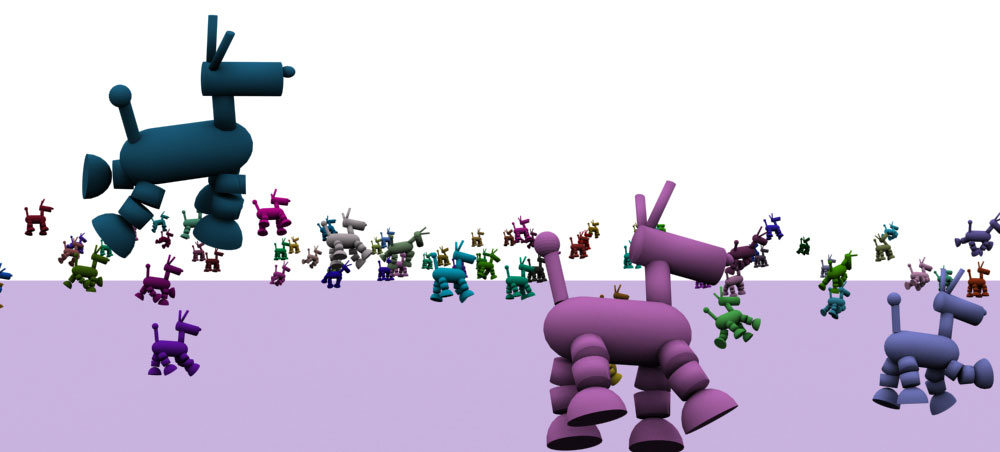
Hanging Toy Dogs |
|
Falling Character |
|
Comparions between BVH- and OQ- based Methods |
(Video Codec: DivX 6.0)
Benchmarking Scenarios
![]()
Swinging Pendulum |
|
|
Haptic-enabled Dog Puppet |
 |
|
Hanging Toy Dogs |
 |
|
Falling Character |
|
|
Links to Relevant Research
![]()
Continuous Collision Detection for Adaptive Simulations of Articulated Bodies project page
by Sujeong Kim, Stephane Redon, Young J. Kim
Adaptive Dynamics of Articulated Bodies project page
by Stephane Redon, Nico Galoppo and Ming C. Lin
Fast Continuous Collision Detection for Articulated Models project pageby Stephane Redon, Young J. Kim, Ming C. Lin, Dinesh Manocha
Copyright 2006 Computer Graphics Laboratory
Dept of Computer Science & Engineering
Ewha Womans University, Seoul, Korea