Introduction
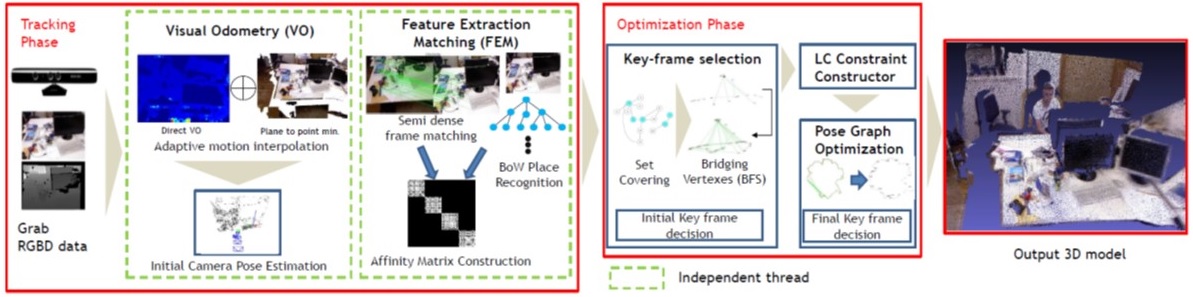
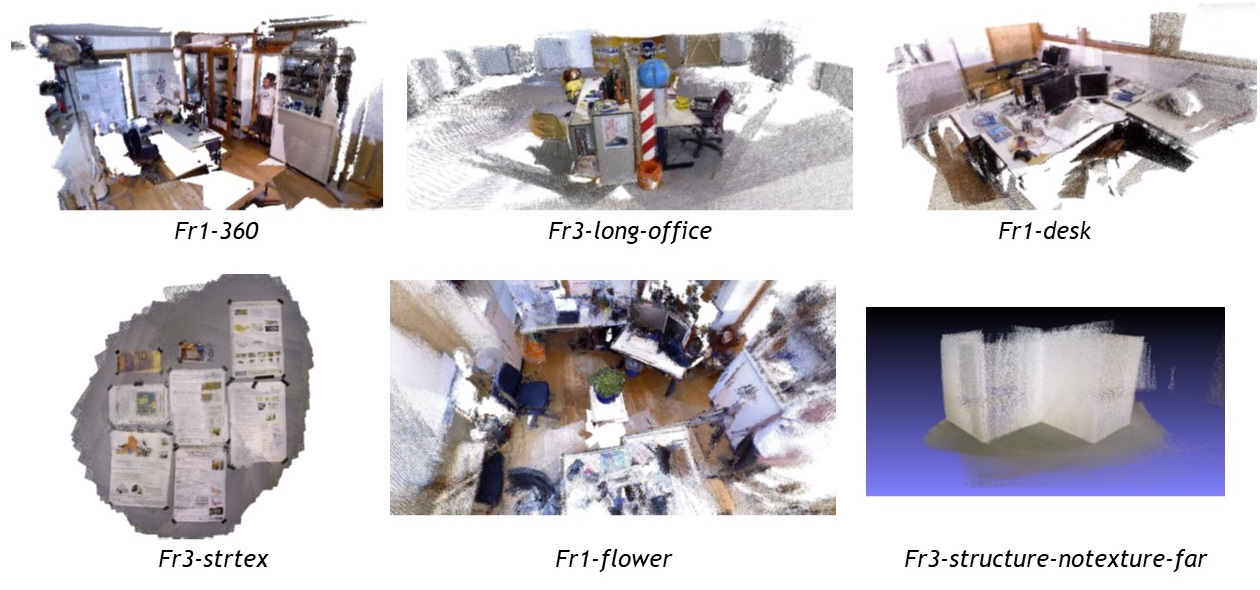
We propose a novel RGB-D camera tracking
system that robustly reconstructs hand-held RGB-D camera
sequences. The robustness of our system is achieved by two
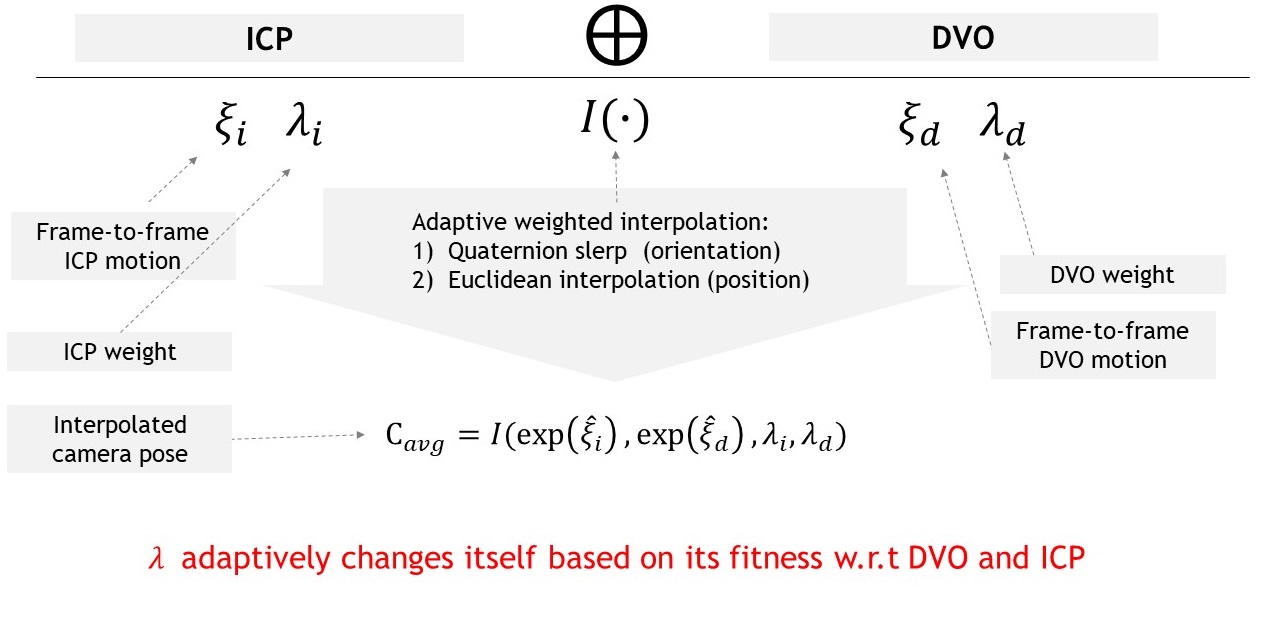
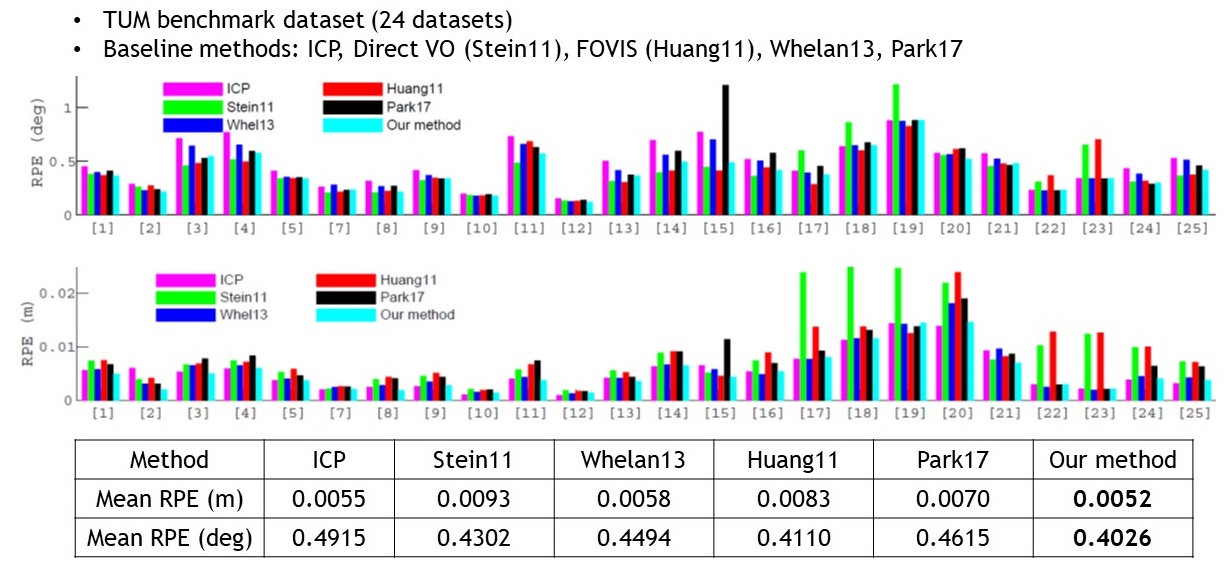
independent features of our method: adaptive visual odometry
(VO) and integer programming-based key-frame selection. Our
VO method adaptively interpolates the camera motion results of
the direct VO (DVO) and the iterative closed point (ICP) to yield
more optimal results than existing methods such as Elastic-
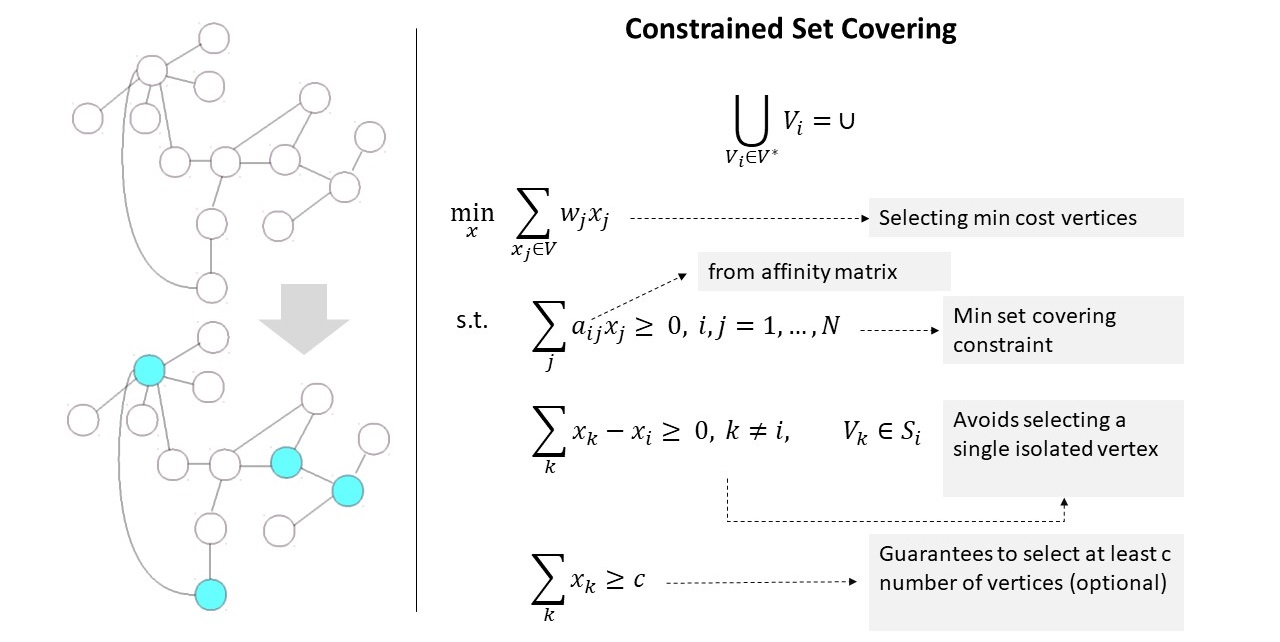
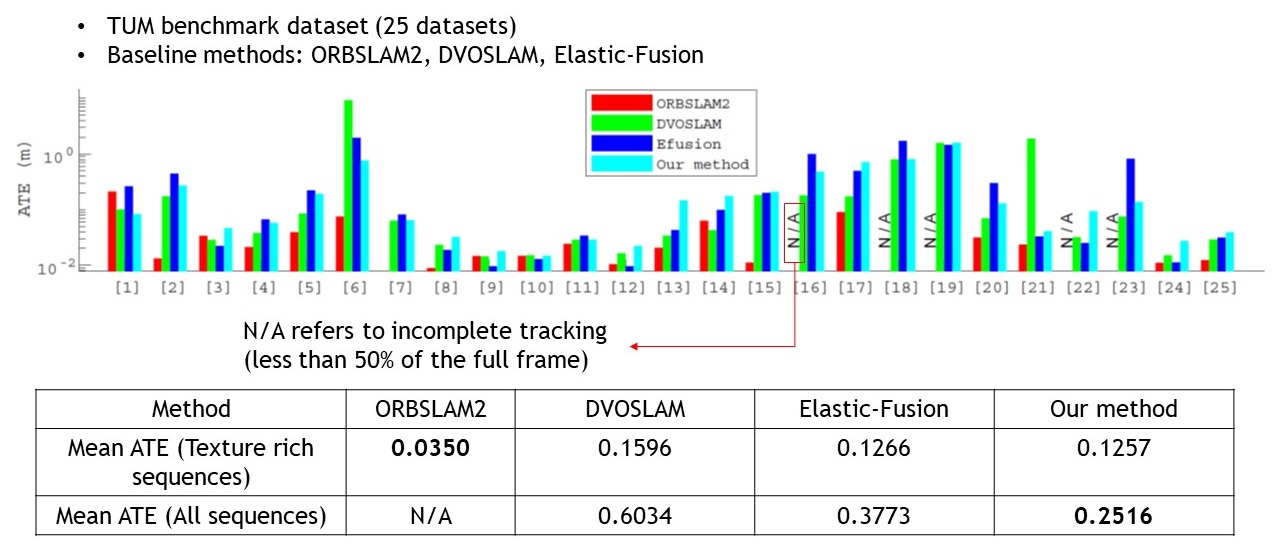
Fusion. Moreover, our key-frame selection method locates
globally optimum key-frames using a comprehensive objective
function in a deterministic manner rather than heuristic or
experience-based rules that prior methods mostly rely on. As
a result, our method can complete reconstruction even if the
camera fails to be tracked due to discontinuous camera motions,
such as kidnap events, when conventional systems need to
backtrack the scene. We validated our tracking system on
25 TUM benchmark sequences against state-of-the-art works,
such as ORBSLAM2, Elastic-Fusion, and DVO SLAM, and
experimentally showed that our method has smaller and more
robust camera trajectory errors than these systems.