|
Hierarchical and
Controlled Advancement for Continuous Collision
Detection of Rigid and Articulated Models
|
||||||||||||||||
|
|
||||||||||||||||
Abstract
We present fast CCD algorithm for
general rigid and articulated models based on conservative advancement. We have implemented the CCD algorithm
with two different acceleration techniques which can handle rigid models, and
have extended one of them to articulated models. The resulting algorithms
take a few milliseconds for rigid models with tens of thousands of triangles,
and a few milliseconds for articulated models with tens of links. We show
that the performance of our algorithms is much faster than existing CCD
algorithms for polygon-soup models and it is also comparable to competing CCD
algorithms that are limited to manifold models. The preliminary version of
this paper appeared in ICRA 2009. |
||||||||||||||||
|
|
||||||||||||||||
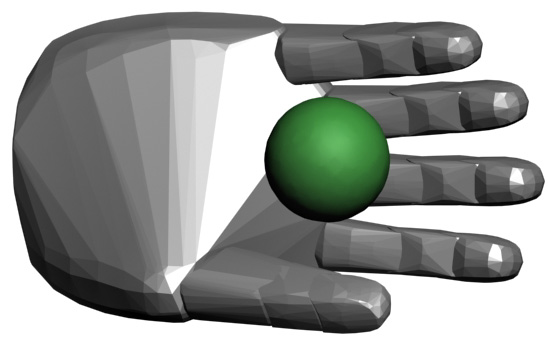
Benchmarking Scenarios
1. Grasping (104.8K):
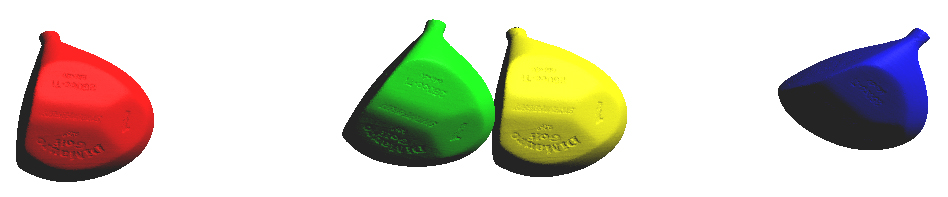
2. Club vs Club (104.8K):
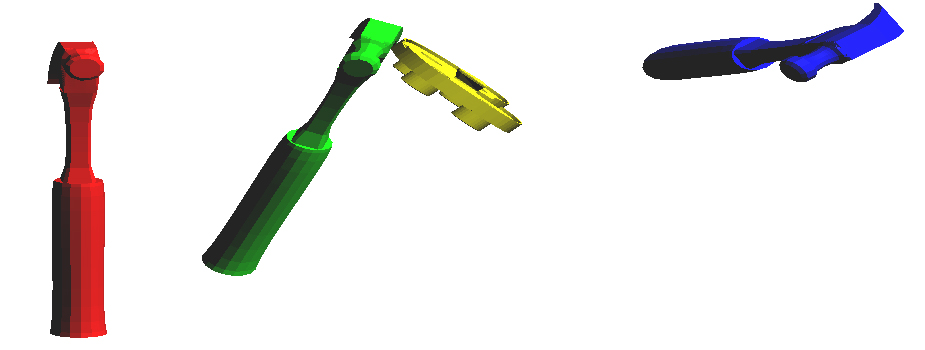
3. Hammer (1.7K) vs CAD Piece (2.6K): A similar set up like the
benchmark 1.
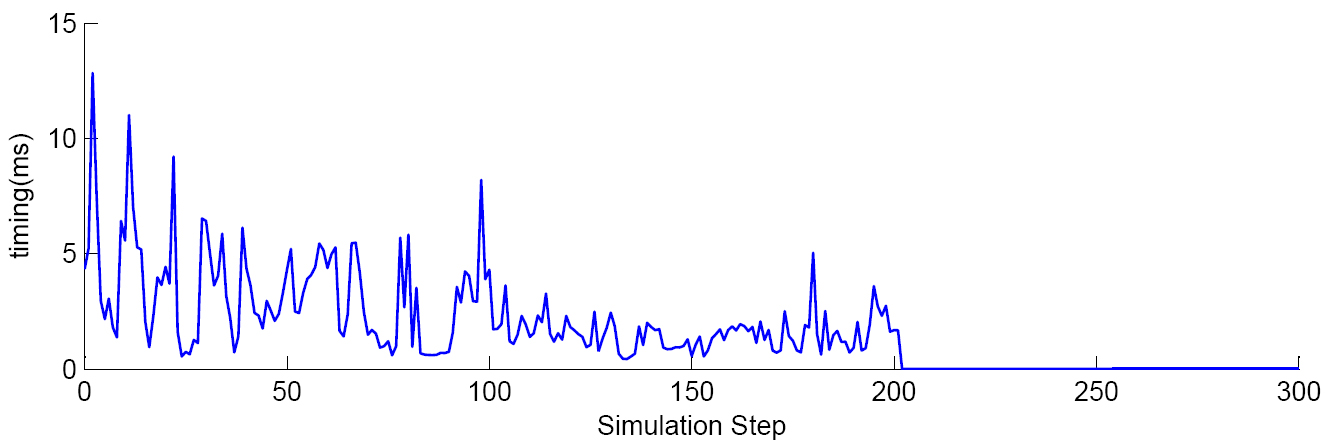
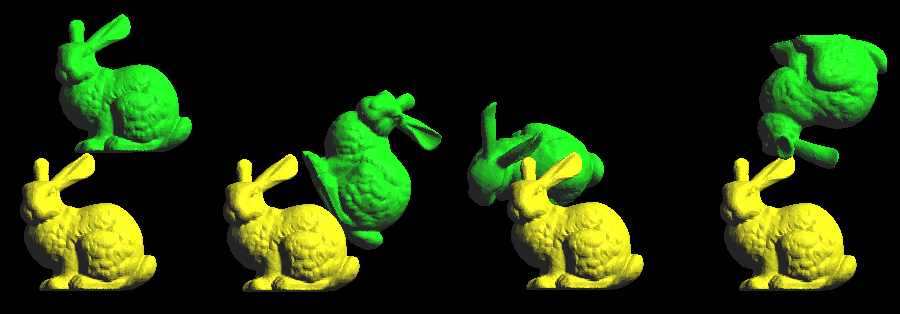
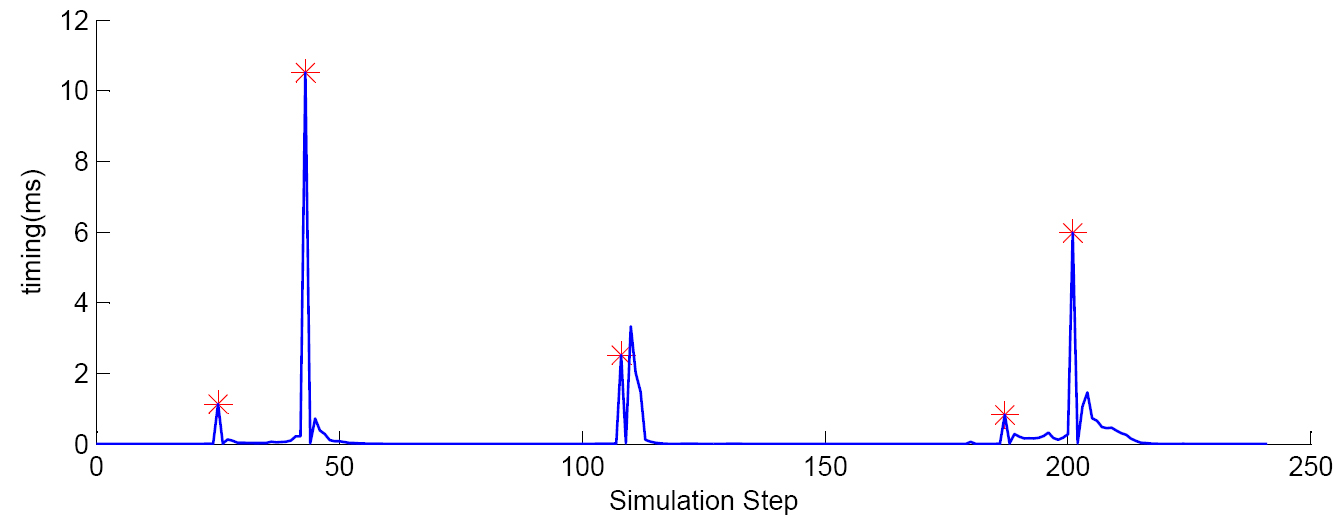
4. Rigid Body Dynamics
for Bunnies:
Using the same benchmarking (Rigid Body Dynamics for Bunnies) setup as
FAST: https://graphics.ewha.ac.kr/FAST/. In the figure, the TOC
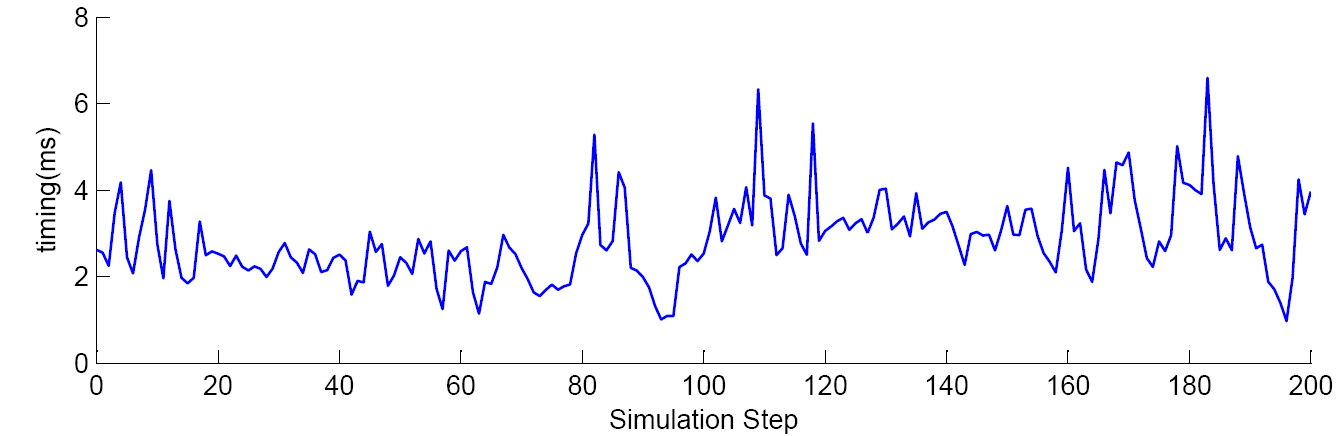
configurations are shown as green objects. In the following graph, "*" shows the simulation steps
when the TOC should be computed.
RELATED LINKS
FAST: https://graphics.ewha.ac.kr/FAST/ CATCH: https://graphics.ewha.ac.kr/CATCH PQP: |
||||||||||||||||
|