| |
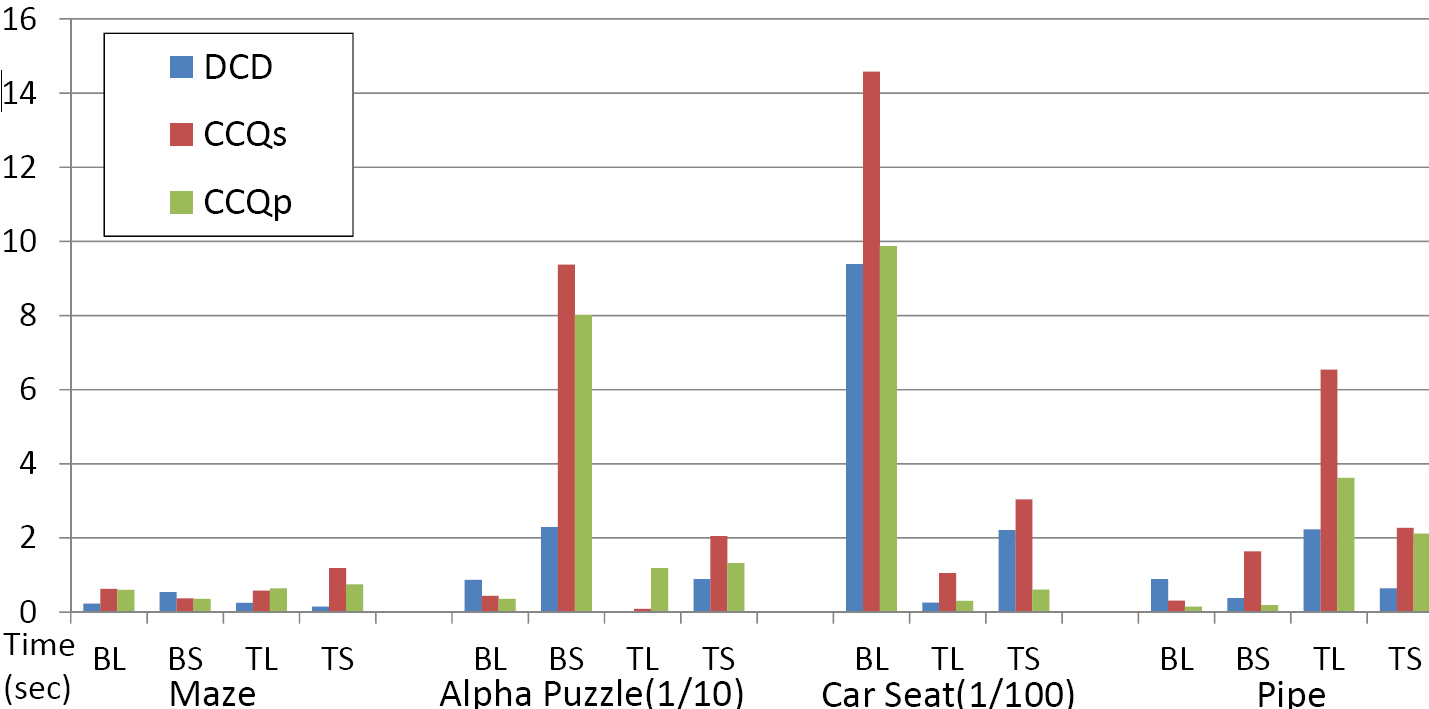
The Performance of RRT
using DCD and CCQ-based Local Planner. The x-axis represents
different benchmarking scenes with different queries such as BL
(Boolean query with a linear motion), BS (Boolean query with a
screw motion), TL (ToV query with a linear motion), and TS (ToV
query with a screw motion) for each benchmark. The y-axis
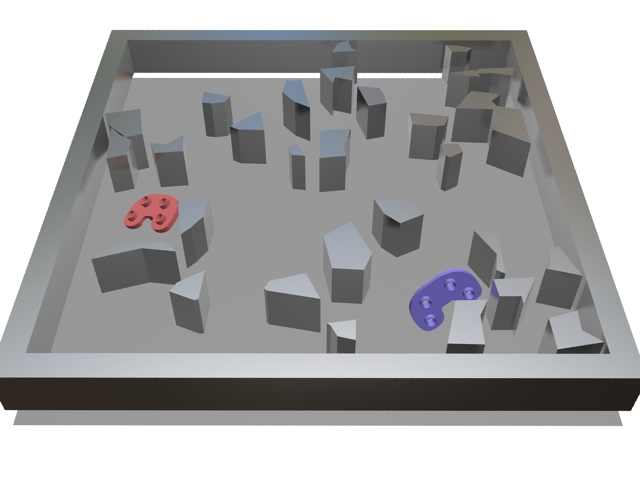
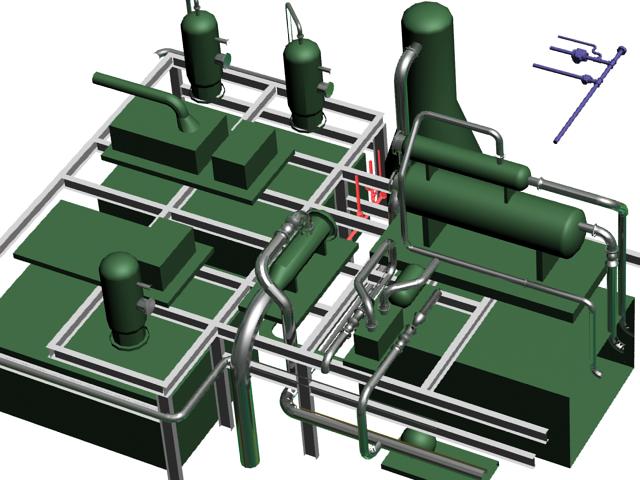
denotes the planning time in seconds for the maze and pipe
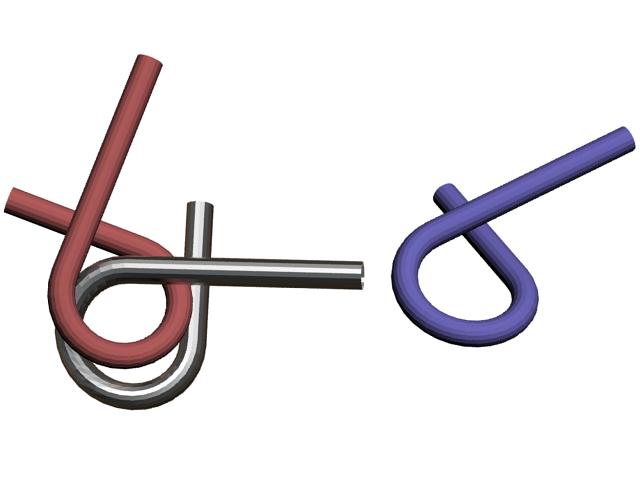
benchmark, in tens of seconds for the alpha puzzle, and in
hundreds of seconds for the car seat. The blue, red and green
bars denote the planning time using DCD, CCQs-based, and CCQp-based
local planners, respectively. |
|