UR 2024
KCGS 2021, 🏆 Best Undergrad Paper Award
Abstract
TSP art is an art form for drawing an image using piecewise-continuous line segments. We present TSP-Bot, a robotic pen drawing system capable of creating complicated TSP pen art on a planar surface using multiple colors. The system begins by converting a colored raster image into a set of points that represent the image's tone, which can be controlled by adjusting the point density. Next, the system finds a piecewise-continuous linear path that visits each point exactly once, which is equivalent to solving a Traveling Salesman Problem (TSP). The path is simplified with fewer points using bounded approximation and smoothed and optimized using Bézier spline curves with bounded curvature. Our robotic drawing system consisting of single or dual manipulators with fingered grippers and a mobile platform performs the drawing task by following the resulting complex and sophisticated path composed of thousands of TSP sites. As a result, our system can draw complicated and visually pleasing TSP pen art.
Robotic Setups
Daul Manipulators
 Two sets of UR5e with Robotiq 3-F adaptive gripper
Two sets of UR5e with Robotiq 3-F adaptive gripperMobile Manipulator
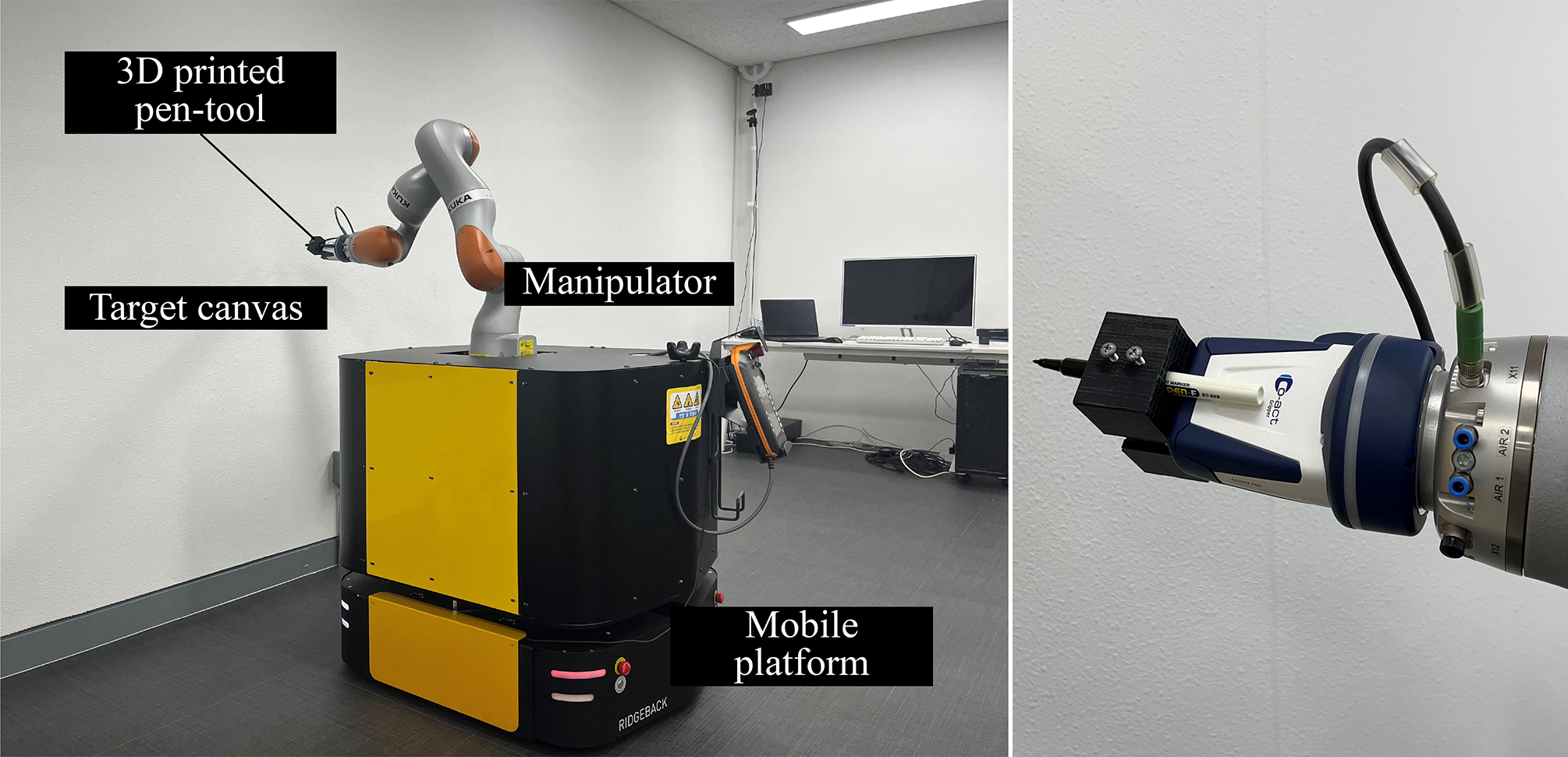 KUKA iiwa 7 R800 and Clearpath Ridgeback
KUKA iiwa 7 R800 and Clearpath RidgebackDrawing Results
Dual Manipulators Drawing Results
 Starry Night
Starry Night Big Ben
Big BenMobile Manipulator Drawing Results
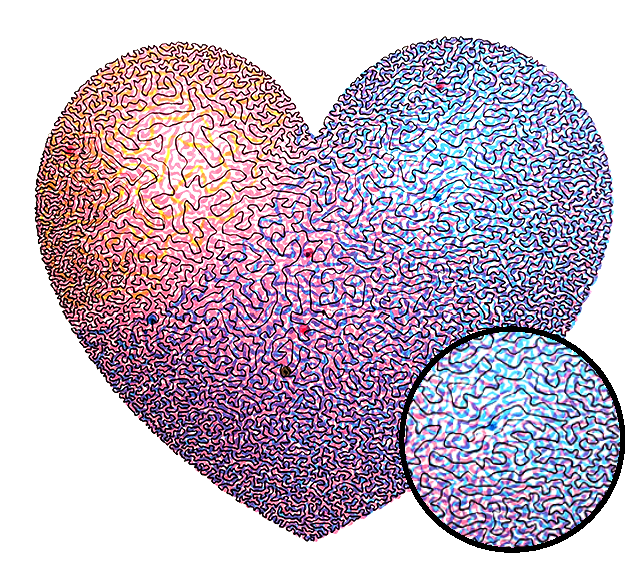 Heart
Heart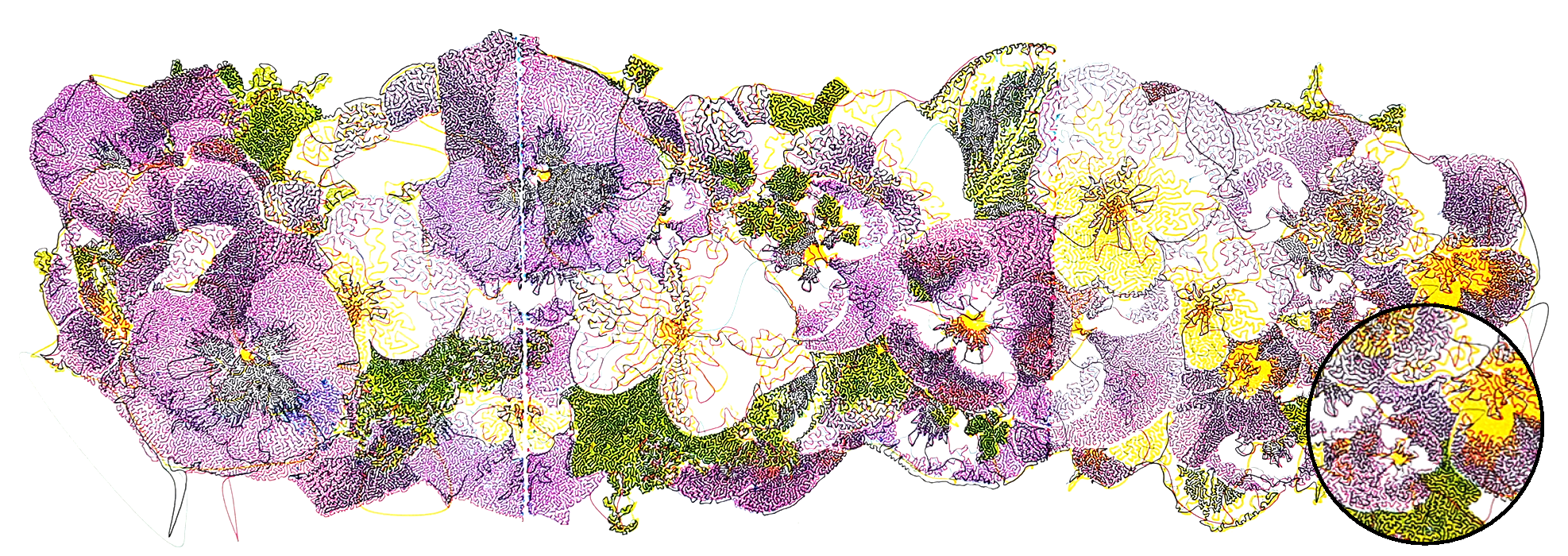 Violet
Violet EWU
EWU 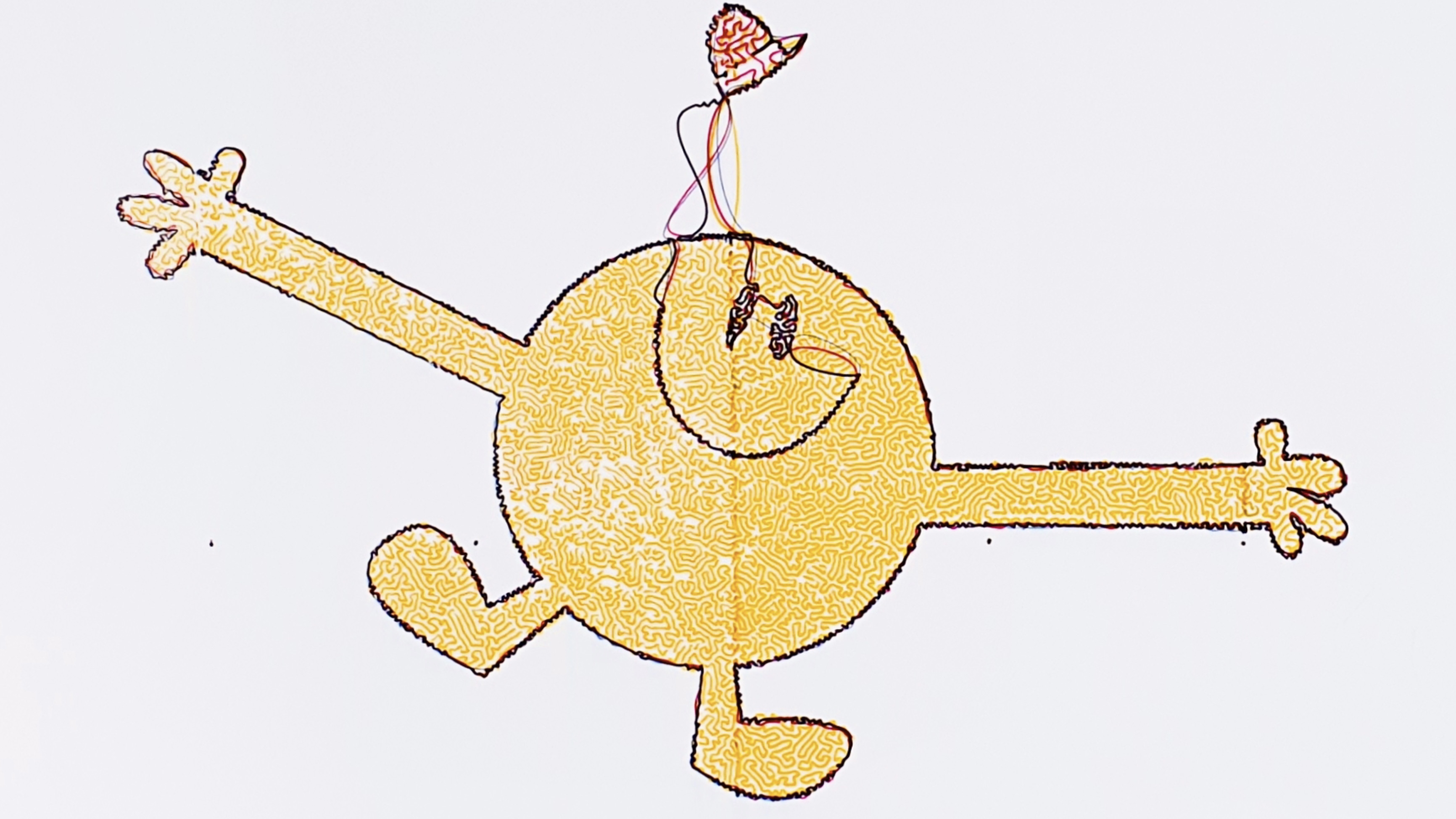 Character
Character
Drawing Statistics
| Starry Night | Big Ben | Heart | Violet | EWU | Character | |
|---|---|---|---|---|---|---|
|
Canvas Size (mm2)
|
315 x 250 | 214 x 300 | 400 x 350 | 850 x 300 | 3600 x 400 | 600 x 400 |
|
# of Stippled Points
|
81,591 | 76,257 | 21,664 | 95,155 | 154,475 | 31,151 |
|
Stipping Time (sec.)
|
32 | 34 | 2 | 35 | 32 | - |
|
TSP Solving Time (sec.)
|
6 | 11 | 4 | 17 | 43 | - |
|
Drawing Time (min.)
|
124 | 63 | 61 | 585 | 662 | 110 |
Bibtex
UR 2024, "TSP-Bot: Robotic TSP Pen Art using High-DoF Manipulators":
@article{song2022tsp,
title={TSP-Bot: Robotic TSP Pen Art using High-DoF Manipulators},
author={Song, Daeun and Lim, Eunjung and Park, Jiyoon and Jung, Minjung and Kim, Young J.},
journal={arXiv preprint arXiv:2210.07592},
year={2022}
}Contact
Ewha Computer Graphics Lab
Department of Computer Science & Engineering, Ewha Womans University
📍 52, Ewhayeodae-gil, Seodaemun-gu, Seoul, Korea, 03760
📞 +82-2-3277-6798
✉️ Daeun Song1, daeunsong@ewhain.net
✉️ Eunjung Lim1, ejunglim12@ewhain.net
✉️ Jiyoon Park1, jiyoonpark13@ewhain.net
✉️ Minjung Jung1, juilejungh63@ewhain.net
✉️ Young J. Kim1, kimy@ewha.ac.kr
1 Ewha Womans University, Korea