🖌️ Our work was showcased in an art exhibition. Please visit HERE for additional information!
IEEE T-RO 2023
IEEE ICRA 2019
IEEE ICRA 2018
Abstract
IEEE T-RO 2023 , extended version with mobile platform:
We present a semiautonomous robotic pen-drawing system, called SSK, that is capable of creating pen art on a large nonplanar surface. Our robotic system relies on a seven-degree-offreedom impedance-controlled manipulator with a three-degreeof-freedom holonomic mobile platform. We use a vector-graphics engine to take an artist’s pen drawing as input, and we generate Bézier spline curves to be drawn on the given target drawing canvas. Then, our system finds a set of minimal, discrete configurations for the mobile platform to cover the entire canvas surface while considering the reachability of the manipulator. The drawing is split into multiple subdrawings according to the found configurations. Our system replicates the spline drawing on the target surface using impedance control, which enables us to compensate for the uncertainty and incompleteness inherent to canvas-surface representations and various robotic and sensor noises. We demonstrate that our system can create visually pleasing and complicated pen art on large, nonplanar surfaces.
IEEE ICRA 2019, extended version with distortion-free conformal mapping: ▼
We present a robotic pen-drawing system that is capable of faithfully reproducing pen art on an unknown surface. Our robotic system relies on an industrial, seven degree-of-freedom(DoF) manipulator that can be both position- and impedance-controlled. In order to estimate a rough geometry of the target, continuous surface, we first generate a point cloud of the surface using an RGB-D camera, which is filtered to remove outliers and calibrated to the physical canvas surface. Then, our control algorithm physically reproduces digital drawing on the surface by impedance-controlling the manipulator. Our impedance-controlled drawing algorithm compensates for the uncertainty and incompleteness inherent to a point-cloud estimation of the drawing surface. Moreover, since drawing 2D vector pen art on a 3D surface requires surface parameterization that does not destroy the original 2D drawing, we rely on the least squares conformal mapping. Specifically, the conformal map reduces angle distortion during surface parameterization. As a result, our system can create distortion-free and complicated pen drawings on general surfaces with many unpredictable bumps robustly and faithfully.
IEEE ICRA 2018, primary version without an RGB-D camera: ▼
We present a semi-autonomous robotic pen-drawing system that is capable of creating pen art on an arbitrary surface with varying thickness of pen strokes but without reconstructing the surface explicitly. Our robotic system relies on an industrial, seven-degree-of-freedom (7DoF) manipulator that can be both position- and impedance-controlled. We use a vector-graphics engine to take an artist’s pen drawing as input and generate Bézier spline curves with varying offsets. In order to estimate geometric details of the target, unknown surface, during drawing, we rely on incremental and adaptive sampling on the surface using a combination of position and impedance control. Then, our control algorithm physically replicates this drawing on any arbitrary, continuous surface by impedance-controlling the manipulator. We demonstrate that our system can create visually-pleasing and complicated artistic pen drawings on general surfaces without explicit surface-reconstruction nor visual feedback.
Drawing Results
Large-scale Drawing Results
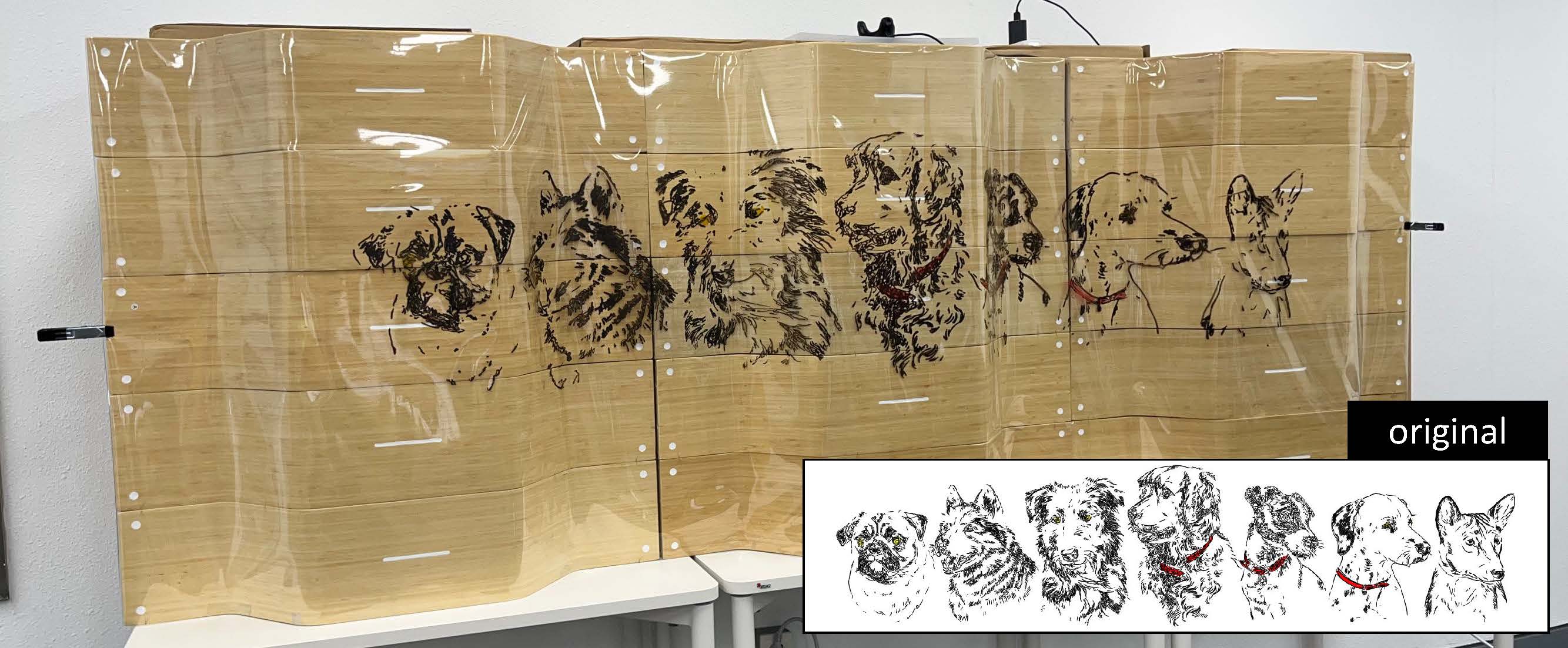 Dogs
Dogs Farm
Farm Paris
Paris Artistic Drawing Results
 Racoon
Racoon Kangaroo
Kangaroo Bear
Bear  Owl
Owl Reproduced on Arbitrary Surfaces
 Tiger1
Tiger1 Tiger2
Tiger2 Girl1
Girl1 Girl2
Girl2Pattern Drawing Results
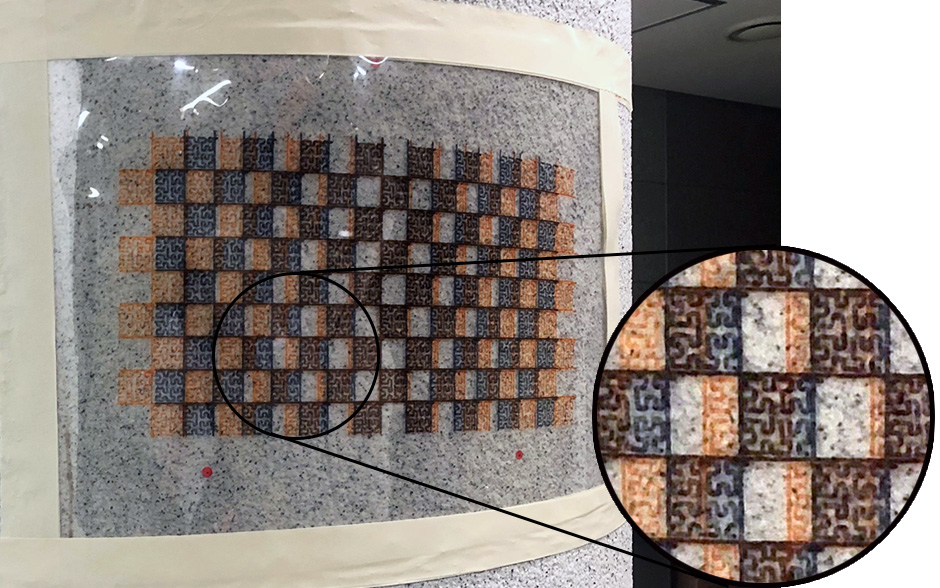 Grid
Grid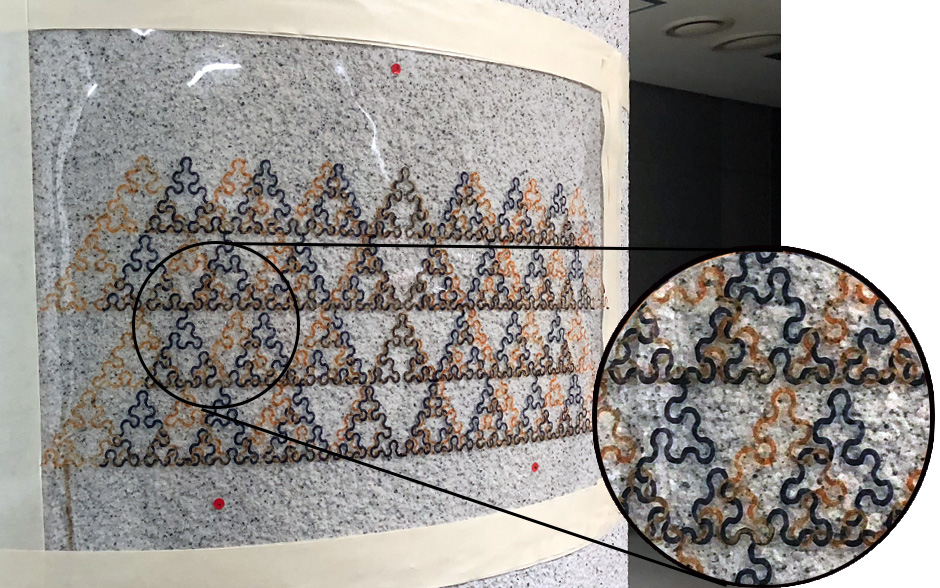 Sierpiński curve
Sierpiński curve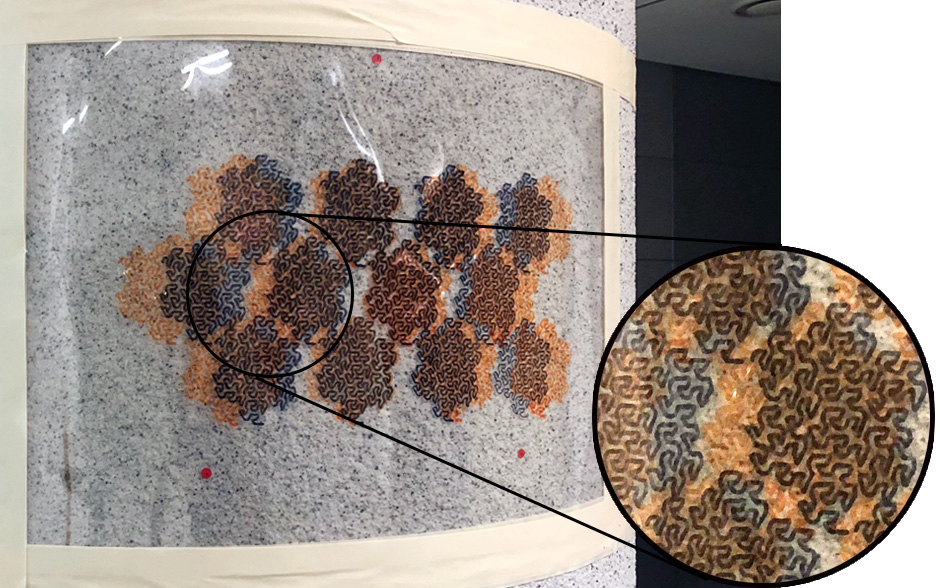 Snowflake
Snowflake
Drawing Statistics (selected)
| Dogs | Farm | Paris | Racoon | Kangaroo | Bear | Owl | |
|---|---|---|---|---|---|---|---|
|
# of Strokes
|
2,634 | 927 | 1,318 | 860 | 3,147 | 1,520 | 1,942 |
|
# of Control Points
|
25,727 | 20,787 | 20,154 | 69,350 | 80,580 | 66,910 | 159,895 |
|
Drawing Surface
Size (mm) |
2000 x 500 | 2000 x 500 | 1187 x 500 | 252 x 491 | 252 x 491 | 252 x 491 | 252 x 491 |
|
Execution Time
(min.) |
186 | 293 | 221 | 317 | 582 | 494 | 307 |
Bibtex
IEEE T-RO 2023, "SSK: Robotic Pen-Art System for Large,
Nonplanar Canvas":
@ARTICLE{10114055,
author={Song, Daeun and Park, Jiyoon and Kim, Young J.},
journal={IEEE Transactions on Robotics},
title={SSK: Robotic Pen-Art System for Large, Nonplanar Canvas},
year={2023},
volume={39},
number={4},
pages={3106-3119},
doi={10.1109/TRO.2023.3268585}
}IEEE ICRA 2019, "Distortion-free Robotic Surface-drawing using Conformal Mapping":
@inproceedings{song2019distortion,
title={Distortion-free Robotic Surface-drawing using Conformal Mapping},
author={Song, Daeun and Kim, Young J},
booktitle={2019 International Conference on Robotics and Automation (ICRA)},
pages={627--633},
year={2019},
organization={IEEE}
}IEEE ICRA 2018, "Artistic Pen Drawing on an Arbitrary Surface using an Impedance-controlled Robot":
@inproceedings{song2018artistic,
title={Artistic pen drawing on an arbitrary surface using an impedance-controlled robot},
author={Song, Daeun and Lee, Taekhee and Kim, Young J},
booktitle={2018 IEEE International Conference on Robotics and Automation (ICRA)},
pages={4085--4090},
year={2018},
organization={IEEE}
}Contact
Ewha Computer Graphics Lab
Department of Computer Science & Engineering, Ewha Womans University
📍 52, Ewhayeodae-gil, Seodaemun-gu, Seoul, Korea, 03760
📞 +82-2-3277-6798
✉️ Daeun Song1, daeunsong@ewhain.net
✉️ Jiyoon Park1, jiyoonpark13@ewhain.net
✉️ Young J. Kim1, kimy@ewha.ac.kr
1 Ewha Womans University, Korea